机构名称:
¥ 1.0
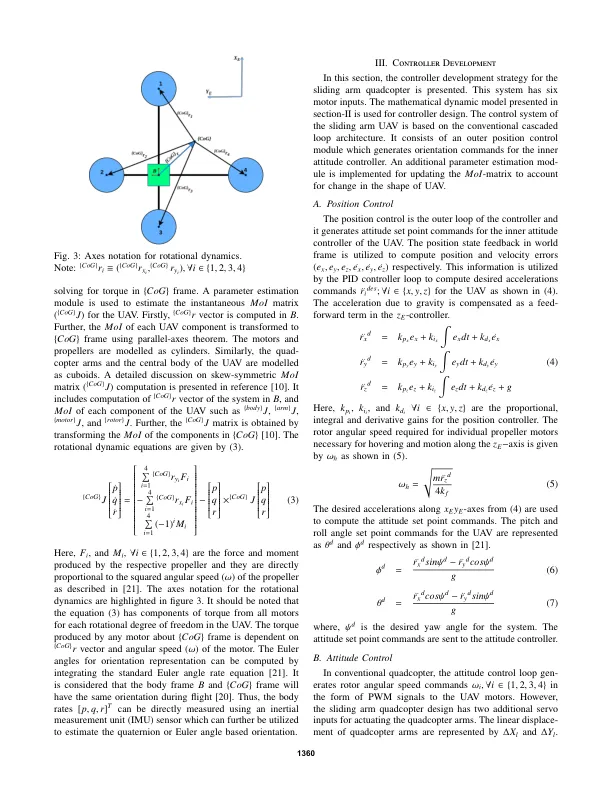
摘要 — 介绍了一种新型四轴飞行器的概念设计和飞行控制器。该设计能够在飞行过程中改变无人机的形状,以实现位置和姿态控制。我们考虑动态重心 ( CoG ),它会导致无人机的转动惯量 ( MoI ) 参数不断变化。这些动态结构参数在系统的稳定性和控制中起着至关重要的作用。四轴飞行器臂长是一个可变参数,它由基于姿态反馈的控制律驱动。MoI 参数是实时计算的,并纳入系统的运动方程中。无人机利用螺旋桨的角运动和可变的四轴飞行器臂长进行位置和导航控制。重心的运动空间是一个设计参数,它受执行器限制和系统稳定性要求的限制。提供了有关运动方程、飞行控制器设计和该系统可能应用的详细信息。此外,通过航路点导航任务和复杂轨迹跟踪的比较数值模拟对所提出的变形无人机系统进行了评估。
具有动态结构参数的滑臂四轴飞行器飞行控制
主要关键词




相关文件推荐