XiaoMi-AI文件搜索系统
World File Search System固定翼



固定翼性能 - USNTPS 校友会
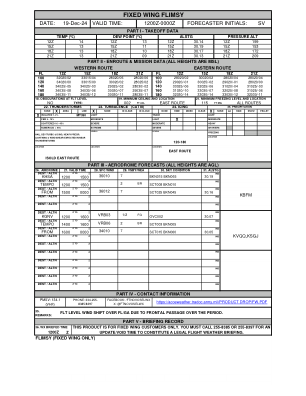
1.7 性能飞行测试条件和飞行员技术 1.11 1.7.1 姿态飞行 1.11 1.7.2 配平镜头 1.12 1.7.3 测试条件 1.12 1.7.4 稳定平衡条件 1.13 1.7.5 不稳定平衡条件 1.13 1.7.6 非平衡测试点 1.14 1.7.7 能量管理 1.15
无人固定翼飞机概念设计...
本文主要研究以太阳能电池为主要动力源的无人机 (UAV) 的空气动力学和设计。该过程包括三个阶段:概念设计、初步设计和飞行器计算流体动力学分析。电动无人机的主要缺点之一是飞行时间;从这个意义上说,挑战在于创建一种可以提高无人机续航能力的空气动力学设计。在本研究中,飞行任务从飞行器设计尝试达到最大高度开始;然后,无人机开始滑翔,并通过太阳能电池实现电池电量恢复。使用概念设计,空气动力学分析重点关注作为滑翔飞行器的无人机,计算从估计重量和空气动力学开始,并以最佳滑翔角度结束此阶段。事实上,气动分析是针对初步设计进行的;此步骤涉及无人机的机翼、机身和尾翼。为了实现初步设计,需要对气动系数进行估算,并进行计算流体动力学分析。
固定翼性能 - USNTPS 校友会
1.7 性能飞行测试条件和飞行员技术 1.11 1.7.1 姿态飞行 1.11 1.7.2 配平镜头 1.12 1.7.3 测试条件 1.12 1.7.4 稳定平衡条件 1.13 1.7.5 不稳定平衡条件 1.13 1.7.6 非平衡测试点 1.14 1.7.7 能量管理 1.15

无人固定翼飞机气动外形优化
1 助理教授,2,3,4 本科生 1,2,3,4 机械工程系,1,2,3,4 戈达瓦里工程技术学院,Rajamundry-533296,安得拉邦,印度 摘要:遥控的重要性日益增加,这刺激了能够飞行的无人驾驶飞行器 (UAV) 的发展,从小型昆虫大小的无人机到大型传统飞机。这些无人机在农业、监视、环境监测、搜索和救援、航空摄影、基础设施检查和科学研究领域有着广泛的应用。本研究旨在通过使用完全自动化的工作流程提高 0 度攻角 (AOA) 下的升阻比来优化固定翼无人机的气动形状。我们的研究包括遗传算法 (GA),它模仿自然选择的进化过程以在复杂的问题空间中发现最优解,以及 PyFluent,一种强大的计算流体动力学 (CFD) 工具。这项工作分为三个阶段:初始阶段、优化阶段和模拟阶段。最佳翼型配置在 0 度 AOA 时实现 24.8 的升阻比,特别是在 40 m/s 的速度下。索引术语 - 无人机、升阻比、0 度 AOA、遗传算法 (GA)、PyFluent I. 简介
固定翼飞机和旋翼机的飞行包线模拟...
13. 摘要(最多 200 个字)已经开发出一种全面的模型拼接模拟架构,它允许基于离散点线性模型和调整数据的集合进行连续的全飞行包线模拟。模型拼接模拟架构适用于任何易于通过状态方程建模并可获得测试数据的飞机配置。特定飞行条件下的单个线性模型和调整数据与非线性元素相结合,以产生连续的准非线性模拟模型。模型拼接架构中的外推方法允许精确模拟非标称飞机负载配置,包括重量、惯性和重心的变化以及高度的变化,这些变化共同最大限度地减少了全包线模拟所需的点模型数量。模型拼接模拟架构在此应用于 CJ1 商务喷气机模型和 UH-60 通用直升机模型。对于固定翼和旋翼机应用,发现使用 8 个离散点线性模型(两个高度各 4 个点模型)加上额外的调整数据配置拼接仿真模型可以在整个空速和高度范围内进行精确模拟。针对固定翼和旋翼机应用,介绍了从飞行识别点模型开发拼接模型的飞行测试意义。
固定翼仿真与控制 - 机器人动力学
任务 2:是否可以选择一组手动控制偏差(和油门设置)来稳定机身 x 轴空速分量 u =13 m s − 1 的开环直线、水平和稳定飞行?如果可以,将控制信号(标准化)设置记录为微调,记录在初始条件向量以及低级控制块(u E 、u A 、u R )和高级控制块(u T )中。这些将作为下一步控制器设计的微调偏差。蓝色的配平用户输入块采用标准化值,即 ∈ [ − 1 , 1]。不必担心获得完美的配平 - 因为我们稍后可能会对其进行改进。进一步记录稳定状态俯仰角 θ - 将此量输入高级控制块的“θ 配平”用户输入源以及“姿态模式开关”左侧的“用户姿态设定点”块。