XiaoMi-AI文件搜索系统
World File Search System基础

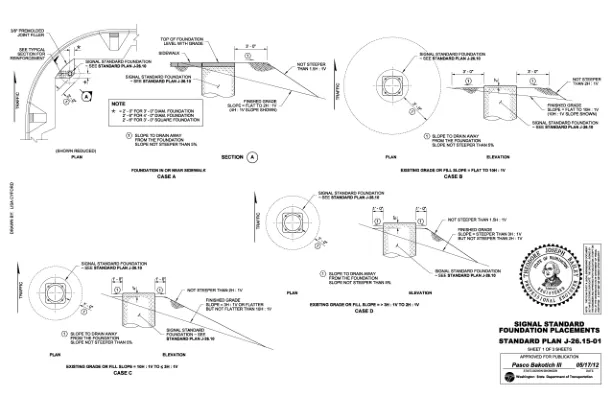
0“对于3'- 0”直径。基础
_____ FOUNDATION /_---- ---x--- -SEE STANDARD / I '', PLAN J-26.10 // ................ ------·---------- .... _ ',, ' / ' / /,.,..--, \ ~(!ffi): I- \ \ .. - ........ _ .// // / < / div>



遗传学基础
摘要:本章探讨了我们对遗传的理解从前孟德尔概念到孟德尔原理的演变及其后续发展。在孟德尔之前,遗传理论主要是推测性的,混合遗传等观点认为后代是父母特征的均匀混合。格雷戈尔孟德尔在 19 世纪中叶的开创性工作引入了颗粒遗传的概念,通过豌豆植物实验证明特征是作为离散单位或基因遗传的。孟德尔提出了三个关键原则:分离定律,该定律指出等位基因对在配子形成过程中分离;独立分配定律,该定律断言不同特征的基因在配子形成过程中彼此独立分配;显性定律,该定律解释了一些等位基因是显性的,而另一些是隐性的。后孟德尔遗传学扩展了这些原则,整合了染色体遗传、基因连锁和分子遗传学的概念,极大地加深了我们对生物遗传和变异的理解。
生物信息学的基础
1。什么是生物信息学,基因组测序项目,模型生物,序列 - 结构 - 功能,生物信息学研究所,生物信息学和转录组,蛋白质组,代谢组,基本序列信息。生物数据库,数据格式,查询形式。比较2个序列,氨基酸相似性,相似性表,相似性因子,数据库中的相似性搜索,FASTA和BLAST算法,期望值。阅读和处理序列数据(Chromas)的方法。准备限制地图(从浮雕包中重新包装程序)。使用来自“浮雕”软件包(绘图ORF,显示ORF和GET ORF)的应用程序读取帧。基于核苷酸序列(来自浮雕封装的Transeq程序)基本序列数据库(DDBJ,EMBL,GenBank)生成蛋白质序列。蛋白质序列数据库。基因组浏览器。通过Expasy Server,数据库:瑞士蛋白石,Prosite访问各种生物信息来源。底漆设计,基本和高级参数,程序:Oligo,ePrimer3(浮雕)),Prime(GCG)。


IT基础设施工程1
分类:IT基础架构工程师1任命权威:信息技术考试日期和时间:2025年2月8日,美国东部时间12:00 - 2025年2月14日,2015年2月14日,美国东部时间11:59,在线考试地点:在线上,无需技术的人可以在:Cuyahoga County Review Commission:Cuyahoga County Review Commission 9830 Lorain Avenue clevelence and Oh 444444102(OH 4444102) Lorain Ave.)此考试仅向在原始发布期内申请的候选人开放,并通过电子邮件通知他们符合分类的最低要求。如果您尚未收到电子邮件通知,则无法参加考试。如果您收到了符合最低要求但尚未收到考试通知的电子邮件,请检查您的垃圾邮件文件夹。很重要!请阅读以下所有信息:•PRC计算机实验室的开放时间为周一至周五美国东部时间上午9:00至下午12:00,以及美国东部时间下午1:00至4:00 pm。实验室从12:00 pm到1:00 pm关闭,并在4:00 pm闭合,没有例外。您可以在此期间的任何时候来到中国,并按需进行测试。•计算机实验室在县假期关闭。请参考此处的假日日历以获取计算机实验室时间表的假期调整。注意:实验室将在2/12的下午关闭。•您必须将有效的照片标识带入考试。如果我们无法确认您的身份,则将不允许您参加考试。您将通过电子邮件通知您的详细信息。请带上清晰,清晰的影印本。•如果您在测试窗口期间无法参加测试,则必须遵循在通知电子邮件中重新安排说明的请求。•如果您要求对申请进行重新审议,并且在安排考试时仍在待定请求,则应允许您参加考试,待解决请求。•如果您希望要求军事服务信贷并尚未提交您的服务证明,则必须携带DD-214表格的副本或完成初始入门级培训的证据(对于储备金组件的人)。不要带上原始副本。•如果您希望为ADA相关的残疾请求测试住宿,则必须遵循通知电子邮件中提供的说明。•一旦考试得分并将资格列表发布到人事审查委员会的网站,您将通过电子邮件通知您。