XiaoMi-AI文件搜索系统
World File Search System外骨骼
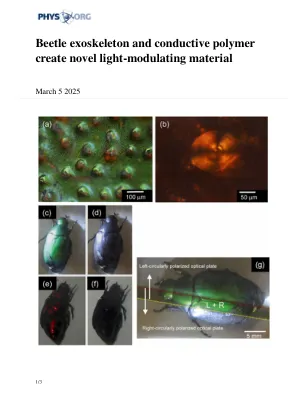
甲虫外骨骼和导电聚合物创建新型的光调节材料
(a)Anomala albopilosa的Elytron的反射和透射光学显微照片。(b)Anomala albopilosa的Elytron的透射光学显微照片。(c)左圆极化光板下方的Anomala albopilosa的金属绿色反射。(d)在右圆极化光板下没有反射。(E)左圆极化光板下方的金属紫色反射。(f)在右圆极化光板下没有反射。(g)左右圆形偏振板下的照片,L + R表示左右极化器的重叠。信用:下一材料(2025)。doi:10.1016/j.nxmate.2025.100516
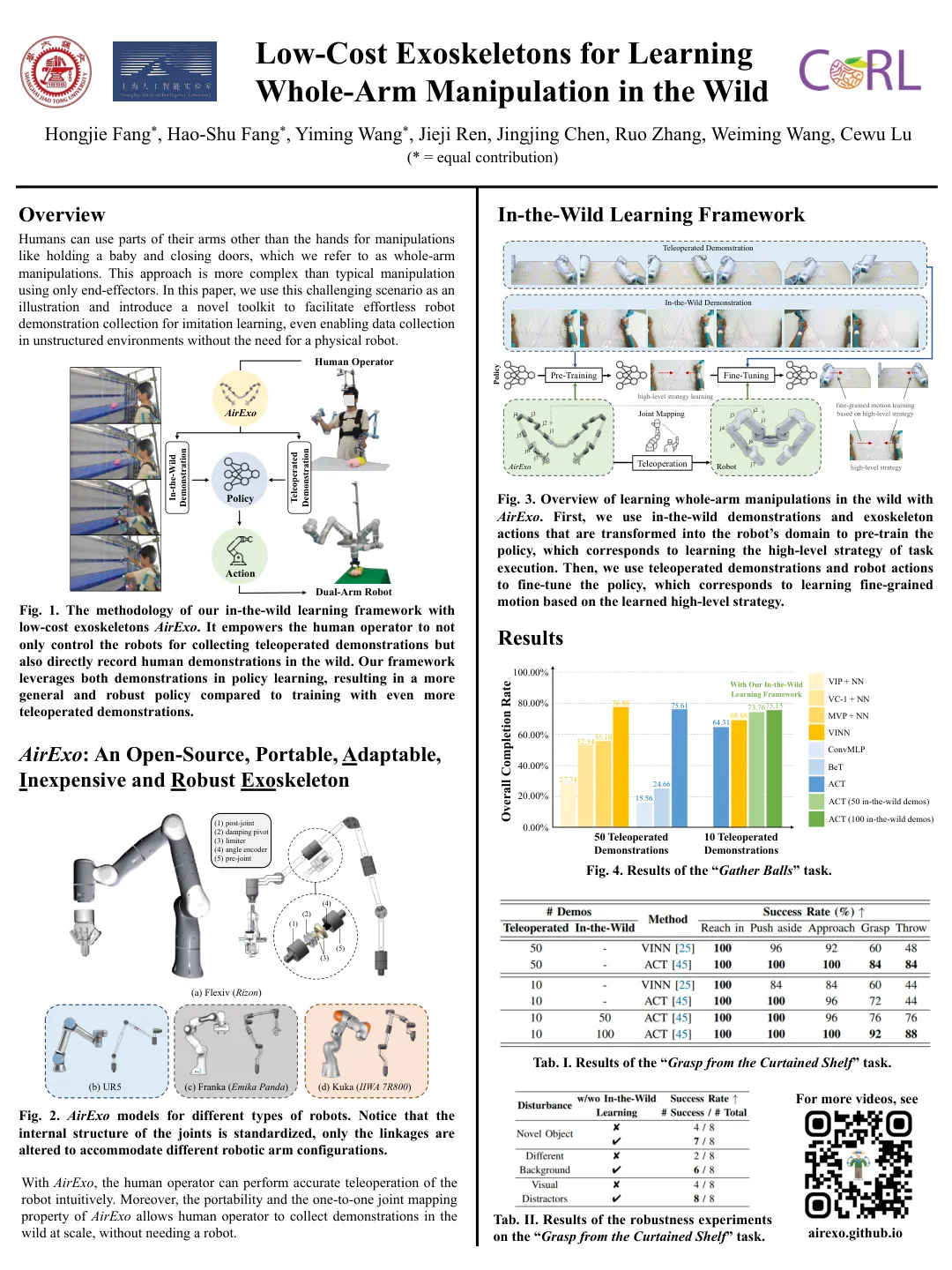
低成本外骨骼用于学习野生武器的全臂操纵
人类可以使用手臂的一部分,而除了握住婴儿和闭门的操作,我们称之为全臂操纵。这种方法比仅使用最终效应的典型操作更为复杂。在本文中,我们将这种具有挑战性的场景用作插图,并引入一种新颖的工具包来促进轻松的机器人演示收集以模仿学习,甚至可以在无需物理机器人的情况下在非结构化环境中启用数据收集。
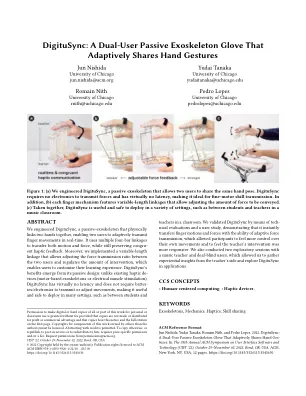
DigituSync:一款可自适应共享手势的双用户被动外骨骼手套
我们设计了 DigituSync,这是一种被动外骨骼,可将两只手物理连接在一起,使两个用户能够实时自适应地传输手指运动。它使用多个四连杆来传输运动和力,同时仍保持一致的触觉反馈。此外,我们实施了一个可变长度的连杆,可以调整两个用户之间的力传输比并调节干预量,从而使用户能够定制自己的学习体验。DigituSync 的优势源于其被动设计:与现有的触觉设备(基于电机的外骨骼或电肌肉刺激)不同,DigituSync 几乎没有延迟,不需要电池/电子设备来传输或调整动作,使其在许多环境中部署都非常有用且安全,例如在学生和老师之间

由活性上肢外骨骼的不同水平的透明度引起的人类运动修饰
主动上肢外骨骼是神经恢复的潜在强大工具。该潜力取决于几种基本控制模式,其中一种是透明度。在这种控制模式下,外骨骼必须遵循人类运动而不会改变它,从理论上讲,这意味着无效的相互作用工作。达到透明度的水平高,尽管不完美,既需要一种适当的控制方法,又需要对外骨骼对人类运动的影响进行深入评估。本文基于识别外骨骼动力学的识别,或者是在力反馈控制或结合下引入了三种不同的“透明”控制器的评估。因此,这些控制器可能会通过设计明显诱导不同水平的透明度。进行的调查可以更好地理解人类如何适应一定是不完事的透明控制器。一组14名参与者受到这三个控制者的束缚,同时在副臂平面进行运动。随后的分析是根据相互作用,运动学,肌电图和人体工程学反馈问卷进行的。结果表明,在执行透明的控制器较少的情况下,参与者的策略往往会引起相对较高的相互作用工作,并具有较高的肌肉活动,从而导致运动学指标的敏感性很小。换句话说,截然不同的残留互动工作并不一定会引起非常不同的运动运动学。这样的行为可以通过自然的人类倾向来解释以维护其首选的运动学的努力,应在将来的透明控制器评估中考虑到这一点。

基于计算机视觉的自适应半自治控制四肢的个体上肢外骨骼
摘要:我们建议使用计算机视觉对上肢外骨骼进行自适应半自治控制,以帮助患有严重四方的用户增加独立性和生活质量。将基于舌的界面与半自主控制一起使用,因此,尽管从颈部瘫痪,但具有完全四倍体的人能够使用它。半自主控制使用计算机视觉来检测附近的物体,并估算如何掌握它们以帮助用户控制外骨骼。测试了三个控制方案:非自主(即使用舌头的手动控制)对照,半自主控制具有固定自治水平的,以及具有基于结合的适应性自治水平的半自主控制。进行了有或没有四肽的实验参与者的研究。根据其性能,对控制方案进行了评估,例如完成给定任务所需的时间和命令数以及用户的评分。研究表明,当使用任何一种半自主控制方案时,性能和用户评分都有明显的改善。自适应半自主控制在某些情况下,在更复杂的任务中,在使用该系统方面进行了更多培训的用户,在某些情况下,固定版本优于固定版本。
脑损伤后步态康复下肢外骨骼的控制策略:系统评价与临床效果分析
每年都有 3000 多名新发病例 [2],脑瘫是全球第三大致残原因 [3]。据估计,全球每 1,000 名新生儿中就有近 2-3 名脑瘫患者 [4,5]。创伤性脑损伤是全球另一大致残原因,每年有 6900 万人幸存 [6]。站立和行走困难是脑损伤的主要后果之一。例如,超过 63% 的中风幸存者患有半轻度至重度运动和认知障碍 [7],30%-36% 的人无法在没有辅助辅助的情况下行走 [8,9]。这会导致独立活动能力的丧失,限制社区参与和社会融合,从而引起继发性健康状况[10]。不同程度脑损伤的人会表现出常见的运动障碍,如瘫痪、痉挛或肌肉协同异常,从而导致代偿性运动和步态不对称[11-15]。这种病理性步态会妨碍熟练、舒适、安全和代谢高效的行走[16]。脑损伤后的恢复过程需要几个月到数年,并且神经系统损伤可能是永久性的[17]。有强有力的证据表明,早期、强化、重复的任务和目标导向训练(逐步适应患者的损伤程度和康复阶段)可改善功能性步行结果 [11, 18 – 23]。然而,由于资源有限和配对的异质性,物理治疗师很难提供所需的训练强度和剂量,同时提取定量信息以最大限度地提高特定患者的功能性步行能力。机器人技术在脑损伤患者的步态康复中可以发挥重要作用。机器人可以执行各种各样的任务,例如,高强度的行走、坐下/起坐或在斜坡上行走。一些机器人控制器还可以促进患者在训练过程中的主动参与和投入,例如通过改变辅助力量的水平[24,25]。训练的高重复性和强度,以及患者的参与,被列为诱导神经可塑性和运动学习的关键因素[26-28]。重要的是,临床证据表明,机器人和传统康复训练相结合对独立行走的能力、行走速度和行走能力有积极影响,尽管目前还没有确凿的证据表明机器人康复优于传统疗法[29-33]。下肢外骨骼可促进任务导向的重复运动、肌肉强化和运动协调,这已被证明对能量效率、步速、和平衡控制[34,35]。与其他机器人相比,外骨骼

使用低成本的开源脑部计算机界面和3D打印的手腕外骨骼
摘要在电力系统中风和太阳能的大规模渗透,这种可再生能源的统治会增加系统的非线性特征和不确定性,这会导致可再生能源产生和负载需求之间的不匹配,并且会严重影响Bus Bus Bus电压分布网络的电压控制网络的电压控制。在这种情况下,本研究应用了泵存储的水力发电(PSH),该水电(PSH)迅速跟踪负载变量,可靠地操作,以平衡系统的功率以最大程度地减少总线电压偏差。此外,为了获得PSH的最佳控制政策,PSH的最佳加固学习算法(即深层确定性的政策梯度)被用于训练代理商来解决泵送储存水电 - 风能 - 极性(PSHWS)系统的连续转换。在IEEE 30-BUS Power System上评估了训练有素的代理的性能。仿真结果表明,所提出的方法每月累积偏差21.8%,这意味着它可以使系统在安全的电压范围内保持更有效。

全面训练的外骨骼使用者的下肢生物力学揭示了通过人类在循环的最佳
有助于脚踝植物的外骨骼可以改善运动的能源经济。表征这些减少能源成本背后的联合级别机制可以使人们更好地了解人们如何与这些设备互动,并改善设备设计和培训协议。我们检查了对经过延长协议训练的外骨骼使用者中对外骨骼辅助的生物力学反应。在未辅助关节处的运动学通常没有辅助不变,这在其他踝部外骨骼研究中已经观察到。峰值plotharflexion角的峰值随着植物的援助而增加,尽管生物关节扭矩和全身净代谢能量成本降低,但仍会增加总和生物机械能力。脚踝plantarflexor活性也随着辅助而减少。对无助的关节作用的肌肉也增加了大量援助的活动,并应长期使用以防止过度损害进行调查。

评估由重复臂运动中的被动上限上限职业外骨骼提供的抗重语支持水平
上行的职业外骨骼以支撑工人的上臂,通常旨在提供抗授权支持。尽管典型的工作活动需要工人进行静态和动态的影响,但文献中的大多数研究都调查了上LIMB职业外骨骼在静态和准静态活动中的影响,而只有少数工作集中于动态任务。本文介绍了由被动上限上LIMB职业外骨骼对重复性手臂运动过程中肌肉活性提供的不同水平抗拨动支持的影响(约为手臂重力负荷的60%至100%)的系统。通过有或没有外骨骼的肌肉激活来评估外骨骼对肌肉活性的影响。考虑了肩部全屈伸延伸周期和子运动的平均肌肉激活,即臂伸入臂伸入(即屈曲)和臂下部(即延伸)运动。结果表明,在考虑完整的屈伸延伸周期和手臂伸向运动中,抗质量SUP端口和肌肉活性减少之间存在准线性相关性(与不佩戴外骨骼相比,减少了64%和61%)。在考虑降低手臂的运动时,提供接近或高于100%的手臂重力负荷的抗骨载支撑,导致伸肌的肌肉激活增加(最高127%),这表明这种抗raviatiation量可能对动态任务中肩部的完全降低肩部的生物力学负荷无效。

预测使用外骨骼进行建筑工作的心理工作量:一种深度学习方法
摘要:外骨骼正在引起人们的注意,作为解决建筑行业背部受伤的潜在解决方案。但是,在施工中使用主动支持外骨骼会引发意想不到的后果,这可能会增加工人的心理工作量。长期增加心理工作可以影响工人的福祉和生产力。预测外骨骼使用期间的心理工作量可以为减轻触发因素提供依据。这项研究研究了两个机器学习框架,用于使用主动的背支持外骨骼进行施工工作来预测精神工作量。实验实验,其中脑电图(EEG)的数据是从戴着主动背支架外骨骼的参与者那里收集的,以执行地板任务。EEG数据接受了预处理,包括频带滤波,缺口过滤和独立的组件分析,以删除工件并确保数据质量。基于回归的长期记忆(LSTM)网络和卷积神经网络和LSTM的混合模型进行了培训,以预测处理后的脑电图数据的未来时间步骤。使用均方根误差和R平方评估网络的性能。平均均方根误差为0.162,R平方为0.939,表明LSTM网络在所有EEG通道上具有更好的预测能力。实际心理工作量和预测的心理工作量之间的比较结果还表明,实际心理工作负载中约有75%的差异是在预测的心理工作中捕获的。这项研究增强了对在建筑工作中使用外骨骼的意外后果的理解。结果强调了各种卷积神经网络方法在识别关键EEG数据特征的有效性,并为未来应用中的算法选择提供了指南。此外,该研究还确定了在使用外骨骼期间评估心理工作量的最合适的大脑通道,从而有助于EEG设备的开发,以优化成本效益,解释力和最少的通道。这项研究为利益相关者提供了宝贵的见解,以便在使用外骨骼并发现缓解机会的同时了解心理工作的影响。