机构名称:
¥ 1.0
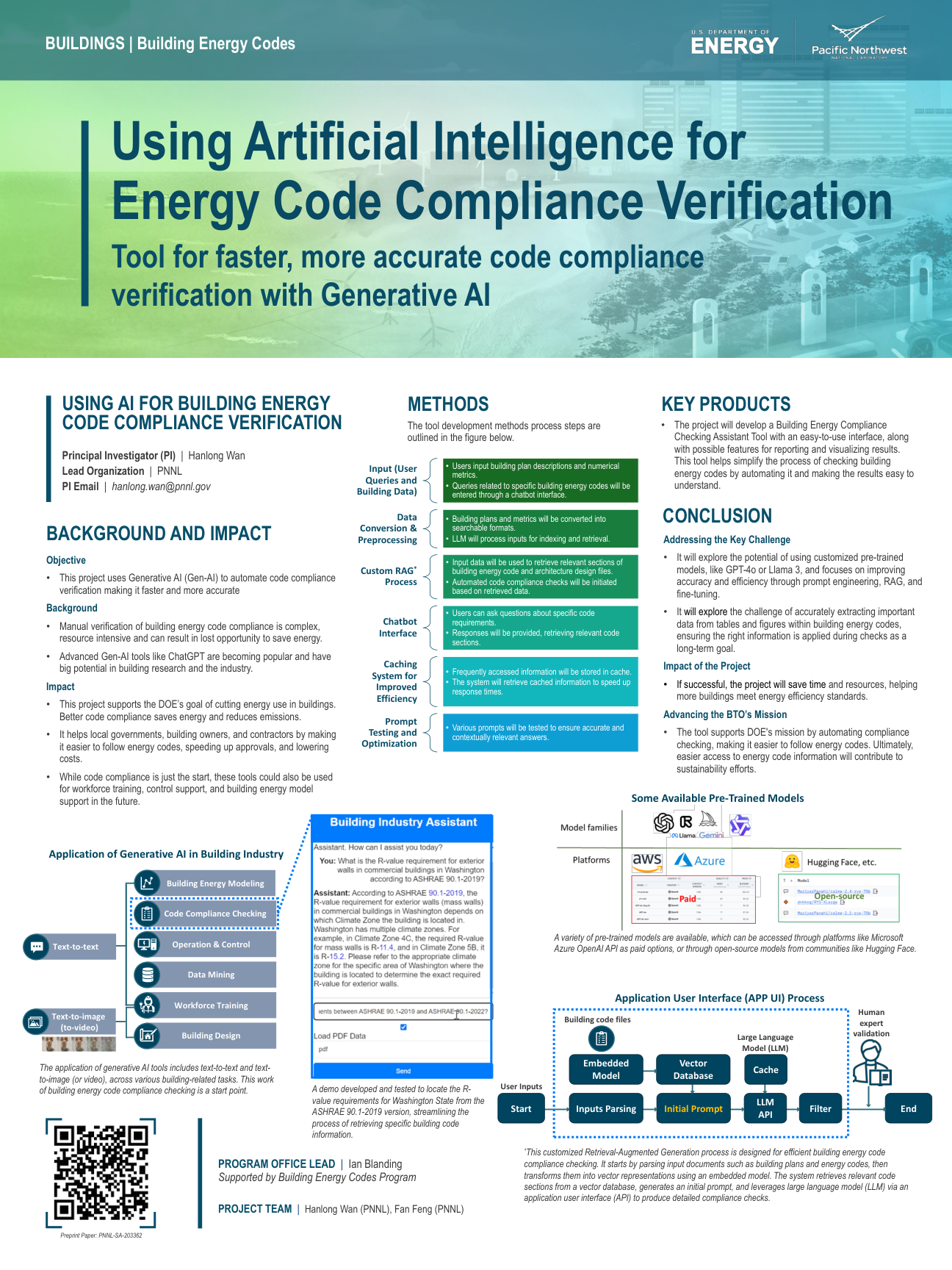
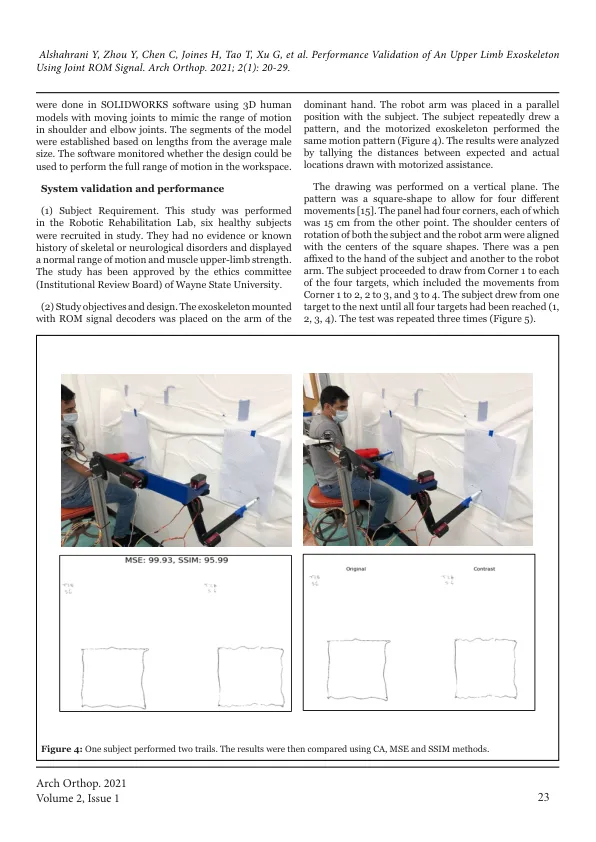
外骨骼系统正逐渐用于机器人辅助手术和神经功能障碍患者的康复。我们实验室开发了一种新型上肢 (UE) 外骨骼,可能用于我们实验室的机器人辅助手术和中风康复。本研究的目的是介绍通过处理 UE 关节的运动范围 (ROM) 来自愿控制 UE 外骨骼的方法。为 UE 外骨骼运动控制设计了同侧对同侧同步 (IIS) 控制和同侧对对侧镜像 (ICM) 控制机制。进行了 3D 模拟以验证运动学运动的机械设计。然后在六名健康受试者中验证了 ROM 控制的 UE 外骨骼的性能。UE 外骨骼在 2D 面板中执行绘图动作。将 UE 外骨骼创建的绘图与健康受试者创建的绘图进行比较,以确定绘图性能的准确性。进行了可靠性统计分析(Cronbach 检验)以确定受试者表现与 UE 外骨骼表现之间的评分者间一致性。结果显示,人体绘图与外骨骼绘图之间存在极好的一致性(Cronbach Alpha 值 = 0.904,p<0.01)。这项研究表明,可以处理 UE 关节的 ROM 以自愿控制 UE 外骨骼。UE 外骨骼可能用于机器人辅助骨科手术和 UE 康复训练。
使用关节 ROM 信号验证上肢外骨骼的性能
主要关键词




相关文件推荐