XiaoMi-AI文件搜索系统
World File Search System导航系统
基于全球空中导航系统绩效的空中交通管制... - 国际民航组织
• 基于轨迹的运营 – 一种新的空域设计和灵活空域管理方法 • 业务轨迹所有权 – 用户参与决策过程 – 用户决定如何尽可能应用约束 • 轨迹管理 – 每次飞行的约定 4D 轨迹 – 尽可能接近用户首选轨迹,其中可能包括巡航爬升 – 仅在出于容量原因的必要时间/地点部署航线结构。– 由使用新分离模式的管制员授权或由使用机载分离模式的机组人员执行 – 以约定的精度执行 – 轨迹修订尊重所有权概念 – 4D 轨迹是信息共享的主要语言
亚米级精度行人室内导航系统,配备...
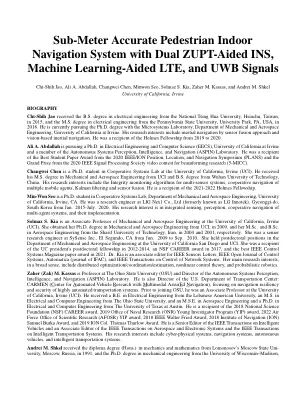
Solmaz S. Kia 是加州大学欧文分校 (UCI) 机械与航空航天工程副教授。她于 2009 年获得加州大学欧文分校机械与航空航天工程博士学位,并分别于 2004 年和 2001 年获得伊朗沙里夫理工大学航空航天工程硕士和学士学位。2009 年 6 月至 2010 年 9 月,她担任加州埃尔塞贡多 SySense Inc. 的高级研究工程师。她曾在加州大学圣地亚哥分校和加州大学欧文分校机械与航空航天工程系担任博士后职位。她曾于 2012-2014 年获得加州大学校长博士后奖学金,2017 年获得 NSF CAREER 奖,并于 2021 年获得 IEEE Control Systems Magazine 最佳论文奖。Kia 博士是 IEEE Sensors Letters、IEEE Open Journal of Control Systems、Automatica(IFAC 期刊)和 IEEE Transactions on Control of Network Systems 的副主编。她的主要研究兴趣广泛,包括分布式优化/协调/估计、非线性控制理论和概率机器人技术。
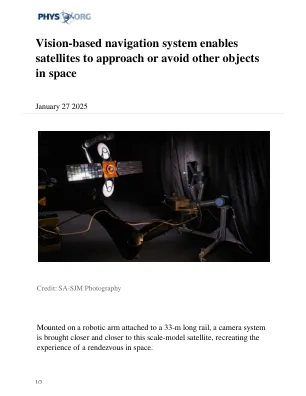
基于视觉的导航系统使卫星能够接近或避开太空中的其他物体
GNC 测试设施的 Joris Belhadj 补充道:“实验室的模型卫星(称为 BlackGEO)的制造包含了地球静止卫星地形的典型元素,并采用了包括多层绝缘和太阳能电池在内的典型卫星表面材料,以增强其光学代表性。这颗卫星也是由 Blackswan 根据 ESA 合同生产的,我们实验室的任何客户现在都可以使用它。”
高科技导航系统对城市设计五要素解读的影响——以香港中区为例
随着智能手机成为大多数城市居民必不可少的、无处不在的附属物,人们越来越依赖数字地图和导航系统作为城市导航的手段。本文以此为出发点,展示了这种技术和能力的变化方式、人们阅读和游览城市的方式,以及用户是否形成了完全不同的城市形象。这项研究的目的是发现导航技术在形成城市形象中的用途,以及与凯文·林奇在其著作《城市形象》中定义的城市设计五要素的关系。香港中环区被用来分析这种导航技术对试图在建筑环境中定位自己的观察者的影响。智能手机和其他支持 GPS 的手持设备上的地图应用程序被用作研究工具,作为一种实证研究方法收集数据。总之,本文强调了导航技术如何扩展林奇试图与这五个要素建立的一致性,但被视为第六个要素。关键词

使用带信标的 BLE 为运动中的用户提供高保真室内导航系统
摘要 由于缺乏可用的 GPS 信号,室内定位和微定位系统变得复杂。蓝牙和 WiFi 填补了这一空白,但这些系统在用户移动时难以保持准确性。使用平滑算法和运行 iBeacon 软件的均匀分布的 BLE 信标,搭配定制设计的 iOS 应用程序,在用户移动时可实现 2 米的精度。本文介绍了以下研究成果:1) 一种使用低成本 BLE 信标的新型室内定位和导航预测系统,当用户以步行速度移动时,其精度为 2.2 米;2) 一种通用室内微定位系统,可以轻松快速地部署到新环境中(数小时内);3) 5 种平滑算法的比较和性能分析;4) 一种架构模型,其他研究人员可以通过它扩展我们在室内定位和导航方面的工作。

磁性响应生物材料和医疗设备的人类临床准备的电磁导航系统
磁导航系统用于精确操纵磁响应的材料,以实现使用磁性医疗设备的新最小侵入性程序。他们的广泛适用性受到高基础设施需求和成本的限制。该研究报告了便携式电磁导航系统,即导航,该导航能够在大型工作空间上产生大型磁场。该系统易于安装在医院手术室,并且可以通过医疗机构运输,从而有助于广泛采用磁性敏感的医疗设备。首先,引入了系统的设计和实现方法,并表征了其性能。接下来,使用磁场梯度和旋转磁场证明了不同微型机器人结构的体外导航。球形永久磁铁,电镀圆柱微孔,微粒群和磁复合细菌启发的螺旋结构。在两个具有挑战性的血管内任务中也证明了磁导管的导航:1)血管造影程序和2)威利斯圆圈内的深度导航。在体内的猪模型中证明了导管导航,以在磁引导下进行血管造影。

使用计算机视觉和AI
抽象 - 火灾危害是一种物理危害,因为缺乏火灾警报和救援导航系统(FARNS),它比以往任何时候都更加夺走生命。消防灾难在行业中日复一日变得越来越麻烦。由于火灾危害,人们正在高层建筑物和行业中死亡。物联网和OpenCV可以带来新的方面来发射警报和救援导航系统。基于OPENCV的消防导航器系统可用于定位火灾危害的位置,并通过在线和离线频道提供紧急火灾警报。与期望相反,消防员可以快速轻松地到达受影响的地区并挽救生命。可靠的消防导航系统和监视解决方案对我们的行业至关重要。我们的系统提出了一种使用基于OPENCV的消防导航系统救出消防人员的不可逾越方式,该导航系统还可以在毁灭性的火灾危害情况下克服互联网和停电。
视觉集成导航系统,用于在 GNSS/SBAS 或 ILS 发生故障时进行飞机最后进近
本文提出了一种视觉集成导航系统,用于引导飞机在最终下滑道上滑行。该系统利用机载视觉系统跟踪跑道特征并估计飞机相对于着陆跑道的 6D 姿态。如果 ILS 或 GNSS/SBAS 传感器性能下降或出现故障,所提出的视觉集成导航系统将允许飞机继续执行最终进近程序,并保持导航精度。为了处理由于图像处理时间而导致的此类基于视觉的测量不可忽略的延迟,建立了一个包含时间延迟测量的误差状态卡尔曼滤波器 (ESKF) 框架。所提出的延迟测量 ESKF 框架利用了这样一个事实:摄像机图像采集由系统触发,因此可以无延迟地通知。这使得导航滤波器能够及时向前执行估计状态的反向传播,以便在测量可用时为未来的校正步骤做好准备。基于此框架的视觉集成导航系统已开发出来,并在模拟中验证了其功能。其估计性能将通过固定翼无人机实验平台上的两种不同视觉系统进行飞行评估。
新墨西哥城机场数据 - 联合国外层空间事务办公室
B. 卫星导航系统 – 1959 年由美国率先建立,称为 TRANSIT(当时俄罗斯开发了 TSIKADA);1967 年向民用导航开放;1973 年美国开发了 GPS,然后是 GLONASS,然后是 GALILEO。C. 惯性导航系统 – 基于惯性力的自主导航系统,提供有关飞行位置以及速度和方向参数的恒定信息(例如,当在海洋上空飞行且没有地面部分提供支持时)。