XiaoMi-AI文件搜索系统
World File Search System异质

POCO:来自异质机器人学习的政策组成
摘要 - 从异质数据中培训一般的机器人策略,用于不同任务是一个重大挑战。现有的机器人数据集以不同的方式(例如颜色,深度,触觉和本体感受信息)而有所不同,并在不同领域(例如模拟,真实的机器人和人类视频)中收集。当前方法通常从一个域收集和汇集所有数据,以训练单个策略以处理任务和域中的异质性,这非常昂贵且困难。在这项工作中,我们提出了一种灵活的方法,即称为政策组成,以通过构成用扩散模型代表的不同数据分布来结合学习场景级别和任务级的广义操纵技巧的信息,以学习场景级别和任务级别的广义操纵技能。我们的方法可以使用任务级组成进行多任务操作,并与分析成本函数组成,以在推理时间调整策略行为。我们将我们的方法培训有关模拟,人类和真实机器人数据,并在工具使用任务中进行评估。组成的策略在不同的场景和任务中实现了鲁棒和灵巧的性能,并且超过了单个数据源的基准,并在模拟和现实世界实验中汇总非常异构数据的简单基线。

准备芯片供应链和异质IC包装
处理器和记忆的组合已经存在了多年,最终以高端处理器和高带宽记忆(HBM)达到最终,以解决一个快速增长的人工智能市场(AI)算法培训。现在,将模具功能的功能分区分为chiplets正在使人们对未来的设计产生更广泛,更有效的影响。chiplet方法允许产品性能提高以在仍然令人信服的成本点继续进行。总硅成本可以降低,这是由于较小的芯片的产量更好,并且有机会使用硅工艺节点的混合物来进一步优化硅的成本。用于异质和chiplet方法的集成电路(IC)包装更昂贵,但是包装成本的上升被硅的总支出减少和有利的上市优势所抵消。

2025异质整合路线图(HIR)8th ...
在洛杉矶。在2023 - 4年,他担任美国商务部的任务,担任国家高级包装制造计划的主任,在那里他为国家包装命令制定了基础战略。他是异质整合和性能缩放中心(UCLA芯片)的创始主任。在此之前,他是IBM研究员。他的主要技术贡献是开发了世界上第一个SIGE基础HBT,盐盐,电气保险丝,嵌入式DRAM和45NM Technology节点,用于使第一代真正的低功率便携式设备以及第一个商业插入器和第一个商业插入器和3D集成产品。自加入UCLA以来,他一直在探索新的包装范式和设备创新,这些范式可能会启用晶圆尺度架构,内存模拟计算和医学工程应用程序。他是IEEE,APS,IMAPS和NAI的院士,也是IEEE EDS和EPS的杰出讲师。他是IIT孟买的杰出校友,并于2012年获得了IEEE DANIEL NOBLE奖章,并获得了2020年IMAPS Daniel C. Hughes Jr Memorial Award和2021年IMAPS杰出教育家奖。艾耶教授也是班加罗尔IISC的Makrishna Rao访问主教教授。

学习以偏见搜索的异质多代理分配
摘要 - 基于信息的覆盖范围指示机器人在区域上移动,以根据某种信息来优化预定义的目标函数。我们先前的工作确定信息图的光谱分解可用于指导一组异质剂,每个剂具有不同的传感器和运动模型,以基于一种称为Ergodicity的度量来优化目标区域中的覆盖范围。在本文中,我们建立在这种见解的基础上,以构建将异质剂分配给频域中不同搜索区域的问题的增强学习公式。我们以三种不同的方式将搜索映射的光谱系数相互关联。第一个方法将代理映射到预定的光谱系数集。在第二种方法中,每个代理都会在所有光谱系数上学习重量分布。最后,在第三种方法中,每个代理都将权重分布作为参数化曲线而不是系数。我们的数值结果表明,根据其感应和运动模型将覆盖责任分配和分配覆盖责任会导致40%,51%和46%的覆盖范围提高覆盖范围的效果,如麦加德指标所测量的覆盖范围,并在搜索区域中分别在搜索区域中提高了所有目标。

Ti基异质合金的多丝电弧增材制造:
P. F. Jiang a , X. R. Li a , X. M. Zong b , X.B. 王 c 、Z. K. 陈 b 、 H. X. 杨 d 1 、 C. Z. 刘 e 、 N .K.高a,Z.Z 。
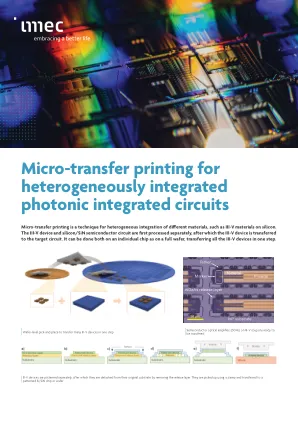
异质集成光子集成电路的微转移打印
免责声明 - 本信息按“原样”提供,不作任何陈述或保证。Imec 是 imec International(IMEC International,根据比利时法律成立的法人实体,名称为“stichting van openbaar nut”)、imec Belgium(由弗兰德政府支持的 IMEC vzw)、imec the Dutch(Stichting IMEC Nederland)、imec China(IMEC Microelectronics (Shanghai) Co. Ltd.)、imec India(IMEC India Private Limited)、imec San Francisco(IMEC Inc.)和 imec Florida(IMEC USA Nanoelectronics Design Center Inc.)活动的注册商标。

大脑区域中的异质运动 BOLD-fMRI 反应......
'引言,对二氧化碳 (CO 2 ) 表现出负血氧水平依赖性脑血管反应 (BOLD-CVR) 反应的脑区被认为患有完全耗尽的自调节脑血管储备能力并表现出血管窃取现象。如果这个假设是正确的,那么血管窃取现象的存在随后应该会导致在基于运动任务的 BOLD-fMRI 研究期间在其他功能性脑组织中产生相等的负 fMRI 信号响应(由于储备能力耗尽,代谢增加但不导致脑血流量增加)。为了研究这个前提,本研究的目的是进一步研究表现出负 BOLD-CVR 的脑区中基于运动任务的 BOLD-fMRI 信号响应。 %材料和方法,纳入了 71 例无运动缺陷的脑血管狭窄闭塞症患者的数据集,这些患者在同一 MRI 检查期间接受了基于 CO 2 校准的运动任务的 BOLD-fMRI 研究(采用指敲范式),以及随后的 BOLD-CVR 研究(采用精确控制的 CO 2 激发)。我们比较了双侧中央前回和中央后回(即感兴趣区域(ROI))的 BOLD-fMRI 信号响应与该 ROI 中的相应 BOLD-CVR。使用对接受相同研究方案的 42 名健康个体的 BOLD-fMRI 任务研究的二级组分析来确定 ROI。结果,BOLD-CVR 的整体下降与 ROI 内的 BOLD-fMRI 信号响应的下降有关。对于表现出负 BOLD-CVR 的患者,我们发现基于运动任务的 BOLD-fMRI 信号响应既有正的也有负的。结论,我们发现,对 CO 2 的 BOLD-CVR 负反应的存在与异质性运动任务 BOLD-fMRI 信号反应有关,其中一些患者表现出更可能的负 BOLD-fMRI 信号反应,而其他患者表现出正 BOLD-fMRI 信号反应。这一发现可能表明

研究葡萄糖异构化与三个异质碳基
Xinni Xiong A,Iris K.M. div> Yu A,B,Danie C.W. div> tsang a, *,liz len a,zhish su,changwei d,ship D,H。Clar,D dd>Xinni Xiong A,Iris K.M. div>Yu A,B,Danie C.W. div> tsang a, *,liz len a,zhish su,changwei d,ship D,H。Clar,D dd>Yu A,B,Danie C.W. div>tsang a, *,liz len a,zhish su,changwei d,ship D,H。Clar,D dd>

chiplet的最新和前景异质整合和混合键
i ntroduction c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c hiplet c。微处理器,例如AMD的EPYC [1-3]和Intel的湖泊场[4-6]和FPGA(可编程的门阵列),例如Xilinx的Virtex [14],具有大量的Chiplet Design和Chiplet Design和杂物整合包装。chiplets之间的一种层状(横向)通信(互连)是桥梁[17,33-42]杂交粘合物已引起了很多关注[17,43-87],因为索尼(Sony 2016年传感器和其他基于图像的设备[45,46]。在这项研究中,将提出chiplet设计和异质整合包装以及混合键合的最新和前景。固定在有机包装底物和环氧造型化合物(EMC)的刚性桥梁和富裕的桥梁。系统 - 芯片(SOC)将首先提到。

hetecooper:异质协作感知的功能协作图
摘要。协作感知通过共享感知信息有效地扩展了代理的感知范围,并且它解决了单车感知中的遮挡问题。大多数现有作品都是基于感知模型同质性的假设。但是,在实际的协作场景中,代理使用不同的感知模型体系结构,这会导致合作者共享的中间功能的规模,渠道数量和语义空间的差异,从而为协作带来了挑战。我们介绍了HeteCooper,这是一个与异质感知模型的场景的合作感知框架。为了建模异质特征之间的相关性,我们构建了特征协作图,该图形完全保留了特征的语义信息和空间信息。此外,基于图形变压器的消息传递机制旨在在功能协作图中传输功能消息。首先,节点通道的数量和语义空间由Sepantic Mapper统一。然后,特征信息是由Edge Weighted引导的注意力集合而来的,最后实现了异质特征的融合。测试结果表明,我们的方法在模型均匀性和异质性方案中都能达到卓越的性能,并且对特征大小的变化也具有良好的可扩展性。