机构名称:
¥ 1.0
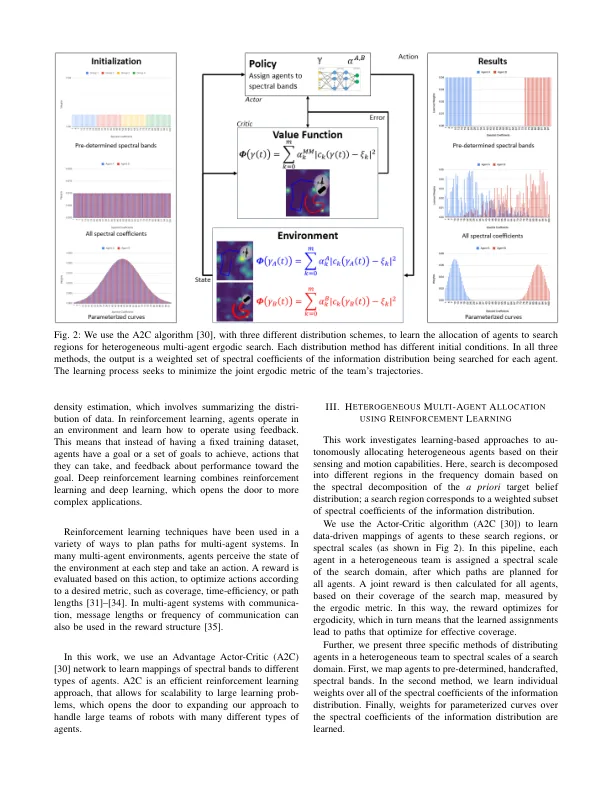
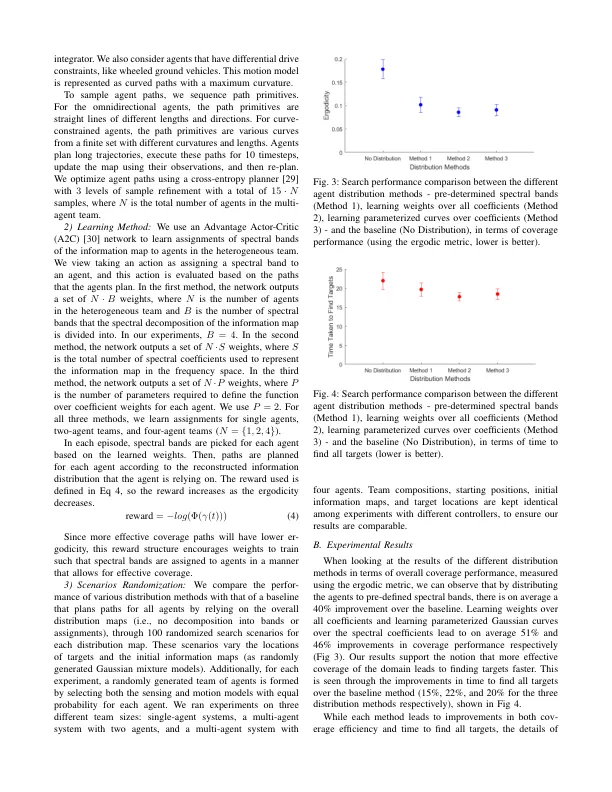
摘要 - 基于信息的覆盖范围指示机器人在区域上移动,以根据某种信息来优化预定义的目标函数。我们先前的工作确定信息图的光谱分解可用于指导一组异质剂,每个剂具有不同的传感器和运动模型,以基于一种称为Ergodicity的度量来优化目标区域中的覆盖范围。在本文中,我们建立在这种见解的基础上,以构建将异质剂分配给频域中不同搜索区域的问题的增强学习公式。我们以三种不同的方式将搜索映射的光谱系数相互关联。第一个方法将代理映射到预定的光谱系数集。在第二种方法中,每个代理都会在所有光谱系数上学习重量分布。最后,在第三种方法中,每个代理都将权重分布作为参数化曲线而不是系数。我们的数值结果表明,根据其感应和运动模型将覆盖责任分配和分配覆盖责任会导致40%,51%和46%的覆盖范围提高覆盖范围的效果,如麦加德指标所测量的覆盖范围,并在搜索区域中分别在搜索区域中提高了所有目标。
学习以偏见搜索的异质多代理分配
主要关键词



相关文件推荐