XiaoMi-AI文件搜索系统
World File Search System故障安全

故障安全
工业革命期间,欧洲各地的技术蓬勃发展,为成功的创新者和工业间谍带来了丰厚的回报——而这两者都不缺!这种回报的承诺为思想的相互交流提供了驱动力,产生了一系列的好处。争论不同创新的相对优点及其在工业经济发展中的作用会带来很多乐趣,但选择一种发展而放弃其他发展可能会错过协同作用。本书推迟了这种乐趣,转而关注金属技术的重要性,从钢铁开始,特别是对如何预测工程部件故障的理解。然而,在零件发生故障之前,它必须被制造出来。在黑色金属中生产有用的形状过去和现在都具有这样的特点:制造形状所需的特性与使该形状有用的特性之间存在根本冲突。形成湿粘土很容易,但制成的罐子只有在烧制后其特性才会发生变化,从而有利于性能。当熔融金属被铸造并凝固成有用的形状时,其特性也会发生类似的巨大变化;铁和钢最有用的成型和变化是在固态下制造压力容器、梁和饮料罐。有利于制造的特性和有利于性能的特性之间的相互作用是微妙的。一种很容易轧制或拉成管状的金属,不像难以成型的金属那样能抵抗日常使用中的损坏。在十九世纪初,人们对这种区别知之甚少。炼铁和炼钢过程中产生的肮脏、高温化学反应产生了质量和性能各异的金属。反过来,故障证据既常见又令人困惑。然而,早期工程师面临的最令人困惑的问题是,他们昂贵的结构由坚固、坚硬的钢制成,经常意外地断裂。一个成功的金属切割工具不应该变钝或容易碎裂,成功的大炮不应该爆裂,矿链不应该在使用中断裂;但它们却碎裂、爆裂和断裂,而且数量众多。从十九世纪初开始,花了八十年的时间才有了一套像样的工程模型和数据工具包,可以理解金属零件和结构的失效和断裂。本文将探讨这些关于工程故障的想法的发展
推进全球核“故障安全”
减少和消除可能导致灾难性后果的核风险(涉及核武器和核能的和平利用)是所有国家的共同利益。这是所有核武国家的持久责任,特别是与《不扩散核武器条约》(NPT)五个核武器国家及其所属联盟的义务有关。2022 年 1 月,中国、法国、俄罗斯、英国和美国领导人共同确认“核战争不可能打赢,也绝不能打”。这一原则对于确保可预测性和减少核战争威胁至关重要。

安全关键系统的故障安全测试
摘要 摘要 本论文提出了一种测试安全关键系统的方法。该方法基于行为和故障模型。分析了这两个模型的兼容性,并确定了使它们兼容的必要更改。然后使用转换规则将故障模型转换为与行为模型相同的模型类型。集成规则定义如何组合它们。这种方法会产生一个集成模型,然后可以使用该模型根据各种测试标准生成测试。本论文使用 CEFSM 作为行为模型,使用故障树作为故障模型,说明了这个通用框架。我们将该技术应用于各种应用,例如燃气燃烧器、航空航天发射系统和铁路交叉口控制系统。我们还研究了该方法的可扩展性,并将其效率与集成状态图和故障树进行了比较。分布式进程的构建和分析 (CADP) 已被用作该方法的支持工具,用于从集成模型生成测试用例,并分析集成模型的某些属性,例如死锁和活锁。

传输方程的有效和故障安全量子算法
在本文中,我们提出了一种可扩展的算法易于故障的计算机,用于在两个和三个空间维度中求解传输方程,以用于可变网格尺寸和离散速度,其中对象壁与笛卡尔网格,与笛卡尔电网相关,每个变化的veer veel veel的相对差异均与裁缝相关范围。我们提供了量子传输方法(QTM)的所有步骤的详细描述和复杂性分析,并为Qiskit中生成的2D流的数值结果作为概念证明。我们的QTM基于一种新型的流媒体方法,该方法可与先进的量子流方法相比,导致减少CNOT门的数量。作为本文的第二个亮点,我们提出了一种新颖的对象编码方法,该方法降低了编码墙壁所需的CNOT门的复杂性,该墙壁现在变得独立于墙壁的大小。最后,我们提出了粒子离散速度的新型量子编码,该量子能够以反映粒子速度的成本进行线性加速,现在它变得独立于编码的速度量。我们的主要贡献包括详细描述量子算法的故障安全实现,用于转移方程的反射步骤,可以在物理量子计算机上容易实现。这种故障安全实现允许各种初始条件和粒子速度,并导致墙壁,边缘和障碍物的颗粒流动行为在物理上纠正粒子流动行为。
在井口安装 RTS 故障安全电动执行器...
本出版物的内容仅供参考,尽管我们已尽一切努力确保其准确性,但不应将其解释为对本文所述产品或服务或其使用或适用性的明示或暗示的保证或担保。所有销售均受我们的条款和条件的约束,这些条款和条件可根据要求提供。我们保留随时修改或改进我们产品的设计或规格的权利,恕不另行通知。

现代 FPGA 架构中的故障安全逻辑设计策略
摘要 — 故障安全计算是指在发生故障时恢复到非操作安全状态的计算系统。在本文中,我们研究了电路级技术作为在现场可编程门阵列 (FPGA) 上实现故障安全计算过程的缓解策略。在使用开源工具创建的 FPGA 架构中,评估了故障效应通过 FPGA 基元(包括查找表 (LUT)、可配置逻辑块和开关盒)的传播。分析表明,与等效专用集成电路 (ASIC) 版本的故障安全电路相比,可重构架构中存在更多漏洞,因此需要更复杂的冗余电路网络和检查逻辑。提出了一种经过 ASIC 验证的故障安全监控电路版本,并将其与 FPGA 中的等效电路要求进行了比较。固定布局和布线的故障安全电路设计策略有助于减少可能的故障传播路径数量并简化故障安全故障检测电路设计。介绍并讨论了基于 FPGA 的具有报警功能的故障安全电路结构的优点和局限性,以及模拟和形式分析。
基于 NCES 的无人机危险分析与风险缓解故障安全机制
摘要:近几年,无人驾驶飞行器(UAV)受到越来越多的关注,以执行各种应用,如军事、农业和医疗领域。众所周知,无人机不仅容易受到软件意外故障的影响,而且容易受到环境的影响。因此,安全性应在设计时作为主要要求考虑,因为飞行器的任何意外行为或任何危险都会导致潜在风险。为了在任务期间保持其安全运行,提出了一种基于网络条件事件系统(NCES)的故障安全机制。故障安全机制是一种控制逻辑,用于指导在发生危险时执行的风险降低措施。为了使用形式化模型生成这样的控制器,所提出的流程分为三个阶段:(1)第一阶段包括根据文献中的反应方法进行危险识别和分析,(2)第二阶段允许使用标准 ISO 13849 进行风险评估,以及(3)第三阶段包括执行重新配置场景以在分析安全要求的同时降低风险。使用形式化方法的动机是,它们已被证明有助于在早期设计阶段使开发过程可靠。我们以一个说明性医疗无人机为例,证明了我们的提案的适用性和可行性。
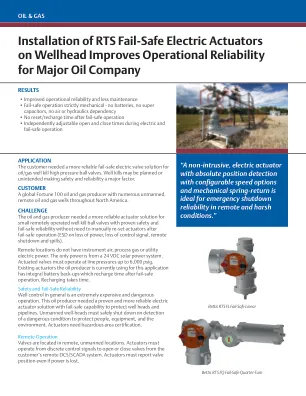
在井口安装 RTS 故障安全电动执行器可提高大型石油公司的运营可靠性
• 无刷直流电机,变频器控制,提供可配置的速度控制 • 低功耗 • 绝对位置检测 • 可挂锁的手动手轮 • 带霍尔效应(非接触式)本地控制站的 LCD 显示屏,带有开-停-关和本地-远程选择旋钮以及连续位置指示 • 显示非侵入式设置和执行器参数 • 5+1 个二进制输入(24 VDC、48 VDC 和 60 VDC) • 8 个可配置数字输出 - ESD 就绪、打开和关闭位置、运行关闭和运行打开方向、过扭矩、选择开关处于本地或远程位置 • 微处理器连续监控所有机械传动系统组件,处于通电和故障安全模式,本地显示本地警报和远程信号 • PST 自动测试模式可将阀门关闭 5%,同时远程开启和关闭功能仍然有效 • 可调故障安全时间使用无摩擦装置(无磨损)的涡流制动器来保护阀门 • 用于现场接线的单独端子室可防止电子设备暴露在环境中 • UL、CSA、ATEX 和 IECEx 认证• 维护间隔长 – 10,000 至 20,000 个运行小时(5 年),艾默生交付后 10 年 • 两年保修
在井口安装 RTS 故障安全电动执行器可提高大型石油公司的运营可靠性
• 无刷直流电机,变频器控制,提供可配置的速度控制 • 低功耗 • 绝对位置检测 • 可挂锁的手动手轮 • 带霍尔效应(非接触式)本地控制站的 LCD 显示屏,带有开-停-关和本地-远程选择旋钮以及连续位置指示 • 显示非侵入式设置和执行器参数 • 5+1 个二进制输入(24 VDC、48 VDC 和 60 VDC) • 8 个可配置数字输出 - ESD 就绪、打开和关闭位置、运行关闭和运行打开方向、过扭矩、选择开关处于本地或远程位置 • 微处理器连续监控所有机械传动系统组件,处于通电和故障安全模式,本地显示本地警报和远程信号 • PST 自动测试模式可将阀门关闭 5%,同时远程开启和关闭功能仍然有效 • 可调故障安全时间使用无摩擦装置(无磨损)的涡流制动器来保护阀门 • 用于现场接线的单独端子室可防止电子设备暴露在环境中 • UL、CSA、ATEX 和 IECEx 认证• 维护间隔长 – 10,000 至 20,000 个运行小时(5 年),艾默生交付后 10 年 • 两年保修
在井口安装 RTS 故障安全电动执行器可提高大型石油公司的运营可靠性
• 无刷直流电机,变频器控制,提供可配置的速度控制 • 低功耗 • 绝对位置检测 • 可挂锁的手动手轮 • 带霍尔效应(非接触式)本地控制站的 LCD 显示屏,带有开-停-关和本地-远程选择旋钮以及连续位置指示 • 显示非侵入式设置和执行器参数 • 5+1 个二进制输入(24 VDC、48 VDC 和 60 VDC) • 8 个可配置数字输出 - ESD 就绪、打开和关闭位置、运行关闭和运行打开方向、过扭矩、选择开关处于本地或远程位置 • 微处理器连续监控所有机械传动系统组件,处于通电和故障安全模式,本地显示本地警报和远程信号 • PST 自动测试模式可将阀门关闭 5%,同时远程开启和关闭功能仍然有效 • 可调故障安全时间使用无摩擦装置(无磨损)的涡流制动器来保护阀门 • 用于现场接线的单独端子室可防止电子设备暴露在环境中 • UL、CSA、ATEX 和 IECEx 认证• 维护间隔长 – 10,000 至 20,000 个运行小时(5 年),艾默生交付后 10 年 • 两年保修