XiaoMi-AI文件搜索系统
World File Search System真空

vero:带有真空清洁剂的四足机器人,用于垃圾垃圾
摘要 - 如今,上线对许多生态系统的平衡构成了重大威胁。一个例子是大海,垃圾来自海岸和城市,通过排水沟,街道和水道,在分解过程中释放有毒的化学物质和微塑料。垃圾去除通常是由人手动执行的,这本质上会降低可以从环境中有效收集的废物量。在本文中,我们提出了一个新颖的四足机器人原型,由于其自然机动性,它能够自主收集烟头,这是全球第二常见的最常见的无垃圾废物,在很难触及轮式和追踪机器人的地形上。我们方法的核心是用于垃圾检测的卷积神经网络,其次是时间优化的计划者,用于减少收集所有目标对象所需的时间。精确的垃圾去除,该过程驱动了真空吸尘器的喷嘴,该清洁器连接到检测到的香烟屁股顶部的机器人腿上之一。由于喷嘴的这种特殊位置,我们能够执行收集任务,而无需停止机器人的运动,从而大大增加了整个过程的时间效率。在六个不同的室外场景中进行了广泛的测试,以显示我们的原型和方法的性能。对作者的最佳知识,这是第一次提出这种设计和方法并在腿部机器人上成功测试。

使用Arduino微控制器的机器人真空吸尘器...
摘要 - 在当前忙碌的时间表中,清洁房屋和周围环境更加艰巨。目前,有一些真空吸尘器需要人类来处理它。手动工作是对机器人技术进行的,许多相关的机器人设备也被广泛使用。这里代表了提出机器人进行地板清洁工作的技术。因此,迫切需要实施无人干预的真空吸尘器。通过该项目实现了一种有效的清洁所需区域的方法。在当今的情况下,人们的工作如此之多,以至于他们常常缺乏正确清洁房屋的能力。解决此问题的解决方案是一个家庭真空吸尘器机器人,例如Irobot Roomba,可以用按钮按下按钮清洁房屋。但是,商业产品通常共有一个常见的问题,即成本。今天,一个团队决定创建一个简单的地板清洁剂机器人。我们将创建的新的Arduino真空清洁剂将具有成本效益和实用性。机器人技术和自动化的进步已经彻底改变了日常生活的各个方面,包括家务。这样的创新是一种机器人真空吸尘器的开发,该清洁剂自动浏览室内空间,检测和清洁灰尘和碎屑。该项目着重于使用Arduino微控制器技术设计和实施机器人真空吸尘器。该项目旨在证明使用随时可用的组件和Arduino编程来建造负担得起的机器人真空吸尘器的可行性。结果包括一个功能原型,能够自主清洁地板,从而有助于家庭自动化技术的发展。Index Terms — Arduino microcontroller, Robotic vacuum cleaner, Home automation, Obstacle detection, Path planning, Autonomous navigation, Sensors, Actuators, Cost-effective solution, Smart home technology, Wireless control, Machine learning, Cleaning efficiency, Microcontroller-based system, Robotics and automation

基于扩展最小作用量原理和真空涨落信息度量的量子力学
摘要 我们证明了非相对论量子力学的公式可以从一个扩展的最小作用量原理中推导出来。这个原理可以看作是经典力学最小作用量原理的扩展,因为它考虑了两个假设。首先,普朗克常数定义了一个物理系统在其动力学过程中为可观测所需表现出的最小作用量。其次,沿经典轨迹存在恒定的真空涨落。我们引入了一种新方法来定义信息度量来测量由于真空涨落引起的额外可观测性,然后通过第一个假设将其转换为额外作用量。应用变分原理来最小化总作用量使我们能够恢复位置表象中的基本量子公式,包括不确定性关系和薛定谔方程。在动量表象中,可以应用同样的方法得到自由粒子的薛定谔方程,而对于具有外部势的粒子仍需要进一步研究。此外,该原理在两个方面带来了新的结果。在概念层面,我们发现真空涨落的信息度量是玻姆量子势的起源。尽管二分系统的玻姆势不可分,但底层的真空涨落是局部的。因此,玻姆势的不可分性并不能证明两个子系统之间存在非局部因果关系。在数学层面,使用更一般的相对熵定义量化真空涨落的信息度量会得到一个取决于相对熵阶数的广义薛定谔方程。扩展的最小作用原理是一种新的数学工具。它可以应用于推导其他量子形式,例如量子标量场论。
机器人真空吸尘器的用户体验
摘要。机器人真空吸尘器是家庭自动化的一个典型例子,也是有关人们如何体验的丰富信息来源。根据为期三周的日记研究,本文将机器人真空吸尘器的住户用户体验(UX)与三种类型的手动真空吸尘器的UX进行了比较。主要发现是使用机器人真空吸尘器在使用不足,但会转换真空。尽管他们的自卑是关于务实的品质,但它们的变革力量与他们的自主权,代理和享乐主义品质有关。这种矛盾的UX涉及机器人真空吸尘器在九个表面中的七个表面上的表现更糟或根本不变,同时似乎会升级清洁标准。诸如吸尘的家庭杂务的转变正在进行中,并呼吁对工程和合并UX的实用和享乐主义方面进行进一步研究。

01/06/2024等离子真空系统
超高真空(UHV)条件现在可以很容易地实现和维护,这要归功于真空泵技术的新发展,例如低温涡轮分子泵,这些发展对于要达到高准确性以防止污染的过程至关重要。泄漏检测和

EZ-VAC™真空歧管
产品设置EZ-VAC TM真空歧管仅用于Zymo研究产品。与其他产品/化学物质一起使用可能会导致人身伤害或财产损失。请参阅套件的说明手册,以获取有关兼容性和处理真空歧管的更多信息。1。从包装中删除EZ-VAC真空TM歧管,单向Luer-Lock Stopcocks和Neoderene Spotper,并检查是否损坏。如果出现任何裂缝,请勿使用。2。将氯丁橡胶塞子插入位于EZ-VAC TM真空歧管1端的孔中。3。将单向Luer-Lock Stopcock牢固地连接到位于EZ-VAC™真空歧管顶部的所有20个歧管连接器上,通过将秒钟的衣领拧到歧管连接器2上。将每个手柄转到水平位置,关闭所有止损。4。将真空软管连接到位于EZ-VAC™真空歧管3端的黑色软管连接器。5。将真空软管连接到真空源4。您的EZ-VAC™真空歧管现在可以使用。
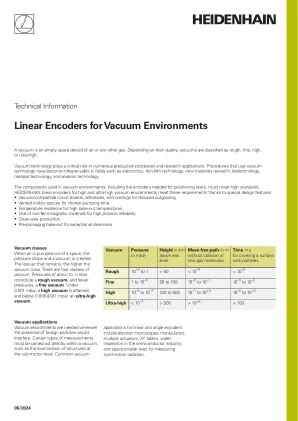
真空环境下的线性编码器
低释气性为防止真空室内压力急剧升高,真空兼容编码器不得释放大量气体。在超高真空中,每个部件都至关重要。例如,某些塑料会释出溶剂。这类塑料通常包含在电路板、粘合剂或涂层中,但在超高真空环境中部署的设备中应完全避免使用。这就是海德汉公司采用真空兼容电路板、粘合剂和涂层的原因。在超高真空环境中,必须将部件数量减至最少。例如,信号转换器应放在真空室外,这就是海德汉公司提供带有外部信号转换器的真空兼容编码器的原因。在仅需要高真空的应用中,这些设备也可放置在真空室内。

结构化腔真空波动工程
在物理学中长期以来已经知道,当光被限制在很小的体积中时,可能会发生有趣的现象[1]。最著名的自发发射在腔中被光扩增,从而导致称为激光器的集体光子模式[2,3]。自从这一发现以来,对光腔的丰富研究传统已经发展出了一些开创性和基本发现。在当前的讨论中,特别有趣的是,光腔内的光线相互作用可以大大增强[4],因此,当物质被放置在光腔中时,双重光 - 亮点特征的准粒子可以形成,因此称为polaritons。已经产生了这些极化子的大量结果[5],并且仍在深入研究它们的形成和表征,并面临许多挑战。例如,在这一研究中,一个很大的里程碑是实现了极化玻色 - 因子凝结物[6,7]。最近开发的想法试图将焦点从极地转变为轻度驱动现象转向其形成对托管材料的作用。在一个称为极化化学的开创性领域中[8]光态状态用于增强和控制化学反应。形成极化子已通过改变势能格局来增强分子中的反应途径[9-14]。在没有实际光子的情况下。这种真空腔材料工程与通常广泛研究的集体效应和驱动(激发)偏振状态的凝结的情况形成鲜明对比。至关重要的是,在极化化学中表明,在强的耦合方案中,腔体中电磁场的真空波动可能会逐渐到电子结构的过渡,因此在黑暗腔中可以发生新的诱发现象,即类似地,与限制光子模式的空腔量子量子 - 电动力学耦合可以通过强烈耦合到真空波动的量子材料的性质进行更改。正式,根据自2010年初以来所做的工作,作为由欧洲研究委员会资助的两个主要项目的一部分(Dynamo 5和
一种探索真空吸引力相互作用的方法
F. Ballarini等人,“ Fluka:地位和观点”,“第15届有关屏蔽加速器,目标和辐射设施的屏蔽方面的讲习班”(Satif-15),美国密歇根州东兰辛,美国密歇根州,美国密歇根州,9月2022日,2022年,2022年,2022年,

HTS磁铁状态和FCC-HH的计划 光子计数ct 的闪光灯和sipms 低温检测器 Y. Celik,A。Stankovskiy,G。van den eynde -28/05/2024 Aleph2耗竭代码的高级特征应用于核设施的放射性保护 使用生成机器学习的6D相空间重建 使用液体氙气tpcs 发现隐藏区域暗物质 SBND的宇宙射线研究 量子密码学 使用结构化纳米材料的超高加速度梯度 科学海报的PowerPoint模板 量子增强机器学习,用于分类物质的量子阶段 涂料沉积 WP6:知识的转移 一种探索真空吸引力相互作用的方法 ARI-SXN梁辐射屏蔽分析 阶段I SD-433+UMD Photon搜索的概述
•探索LTS磁铁的性能限制,重点是强大的大规模实现•探索超出NB 3 SN限制的HTS磁铁技术,用于加速器应用•开发下一代的加速器磁铁,用于未来的colliders