XiaoMi-AI文件搜索系统
World File Search System自动的

基于脑电图的大脑 - 计算机接口...
抽象背景:大脑计算机界面的医疗应用中的进步(如运动图像系统)高度促进使残疾人生活更好。这种系统的挑战之一是实现高分类精度。方法:此处提出了一种具有低计算复杂性的高度准确的分类算法,以对不同的电机成像和执行任务进行分类。对两个脑电图数据集(伊朗大脑 - 计算机界面竞争[IBCIC]数据集和世界BCI竞争IV数据集2A)进行了一项实验研究,以验证该方法的有效性。对于较低的复杂性,除了增加了类可分离性外,还应用了常见的空间模式将64个通道信号降低到四个组件。从这些组件中,首先,在时间和时间域中提取某些功能,接下来,通过采用逐步线性判别分析(LDA)方法,选择它们的最佳线性组合,然后将其应用于训练和测试,包括LDA,LDA,LDA,LDA,随机森林,支持矢量机,以及K最近的邻居。分类策略在二元分类器的结果中进行多数投票。结果:实验结果表明,所提出的算法准确性比第一个IBCIC的赢家高得多。关于世界BCI竞赛的数据集2A,第6和9的受试者获得的结果优于其对手。此外,该算法的平均KAPPA值为0.53,高于第二个竞争者的冠军。结论:结果表明该方法能够以有效和自动的方式对运动图像和执行任务进行分类。
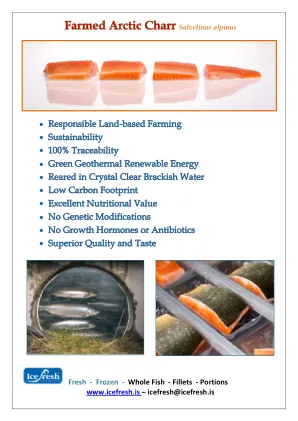
耕种北极收费Salvelinus
孵化后,将Alevins(Yolk Sac幼虫)转移到苗圃中,在该苗圃中,将鱼在淡水中饲养到70-150g,然后转移到生长的地点。在那里,Charr是在最佳可用条件下在高质量的咸水中耕种的,直接从现场的钻孔中抽出。钻孔的水已经通过冰岛熔岩自然过滤。萨默吉(Samherji)成长的农场的合并生产能力每年约为4000吨北极Charr。在所有农场中,环境因素,例如氧气水平,盐度,密度(最大50kg/m3)和温度,并经常监测和调整,以最适合每个阶段鱼类的最佳生活条件。喂养和氧合是自动的,并且可以控制计算机,因此可以从任何地方进行监控和控制。根据我们在北极Charr农业方面的丰富经验,我们的喂养方法特别适合北极Charr的喂养习惯。来自冰岛的LaxáfefMill Ltd.(由Samherji拥有)的Feed是北极Charr野生生产中唯一使用的饲料。用于生产Laxá饲料的鱼粉和鱼油来自冰岛水域的可持续托管(MSC)鱼类种群。海洋蛋白约为饲料中总蛋白的50%,并且含有鱼类和菜籽油。没有使用动物界的其他蛋白质来源,也没有将药物添加到饲料中。唯一使用的色素是天然物质。
通过热电发生器(OE 20200825)
摘要。检测高能激光罢工是军事资产在未来战争中生存的关键。引入激光武器系统要求能够快速检测到这些罢工,而不会通过主动传感技术破坏军装的隐身能力。我们探索了热电发生器(TEG)用作自动的被动传感器来检测此类罢工的使用。使用各种功率等级,波长和光束尺寸的激光器进行实验,以击中2×2 cm 2以不同构型排列的市售TEG。在8.5至509.3 w∕cm 2之间,用808-,1070-和1980 nm激光击中TEG的开路电压和短路电流反应,比较了2至8 mm之间的斑点。teg表面温度表明传感器可以在接近400°C的温度下存活。teg开路电压幅度与净入射激光功率相比,与特定的辐照度水平更加密切,并且线性受到温度变化的限制。开路电压响应以10%至90%的升高时间为〜2至10 s,尽管表面温度未达到等级。以开路电压为传感参数,检测阈值高于标准偏差噪声水平,可以在激光罢工开始后的300毫秒内超过辐照度的辐射水平约为200 w∕cm 2。根据测得的电响应估算了估计高达16 MW的潜在收获功率水平。开发了与实验相对应的多物理有限元模型,以进一步优化轻质,低剖面TEG传感器,以检测高能激光罢工。©2020光学仪器工程师协会(SPIE)[doi:10.1117/1.oe.59.11.117105]

语言模型作为视觉的黑盒优化器...
在Web-scale数据集中预先训练的视觉语言模型(VLMS)在用最小数据调整时,在下游任务上表现出了显着的功能。但是,许多VLM依赖于专有数据,而不是开源数据,这限制了使用白色框的使用进行精细调整。因此,我们旨在开发一种黑匣子方法来通过自然语言提示来优化VLM,从而避免需要访问模型参数,功能嵌入甚至输出逻辑。我们采用基于聊天的LLMS来搜索VLM的最佳文本提示。特别是,我们采用了一种自动的“爬山”程序,该程序通过评估当前提示的性能并要求LLMS根据文本反馈来对其进行融合,从而将其融合到有效的提示中,所有这些程序都在没有人类的对话过程中进行了反馈。在具有挑战性的1-Shot图像分类设置中,我们的简单方法平均超过了白色框连续提示方法(COP)1。在包括Imagenet在内的11个数据集中有5%。我们的方法还优于人工工程和LLM生成的提示。我们高出了对话反馈的优势,该反馈既不是正面和负面提示,表明LLM可以在文本反馈中利用隐式“梯度”方向,以进行更有效的搜索。此外,我们发现通过我们的策略生成的文本提示不仅更容易解释,而且还以黑盒方式在不同的VLM架构上良好地转移。最后,我们在最先进的Black-Box VLM(DALL-E 3)上演示了我们的框架,以进行文本对图像优化。

风向氢氨飞行项目
2025年2月11日主席Swedzinski House Energy Finance and Colition Commitcon Re:H.F. 9主席Swedzinski和委员会成员,Cure是一个基于乡村的非营利组织,致力于保护和恢复有弹性的城镇,并通过利用关心他们的人的力量来保护富有弹性的城镇和景观。我们感谢有机会在反对H.F. 9.强烈反对H.F. 9的一部分,这些部分将允许所有水力发电,无论其规模如何,都可以符合公用事业的无碳合规性要求,这些要求将废除现有的核暂停,并为无法实现无碳标准的公用事业建立一个自动的三年宽限期。这些变化似乎是仓促且考虑不足的,并且在不与受影响社区互动的情况下采用它们与2023年制定的碳无碳标准背后的意图相反。,但是今天我们的证词的主要重点是H.F. 9的看似简单部分,建议“支持明尼苏达州的碳捕获和隔离技术的开发和部署”。碳捕获,利用和固存或CCU是一种不受支持的脱碳策略,它延迟了公平的清洁能源过渡,它为化石燃料行业提供了继续污染的许可,并冒着公共健康和安全风险。当今美国大约有16个CCUS设施。1据报道,这些设施每年有能力捕获超过2000万吨的CO 2,但数据表明,大多数人在实践中无法实现这一目标。2实际上,在某些情况下,由于与某些CCUS技术相关的13%-44%的能源罚款,设施的排放量增加了。3并且由于CCUS技术的重点是CO 2排放,因此这些系统并未固有地解决或补充其他污染物的发射,例如氮氧化物,硫氧化物,甲烷,汞,砷,砷,颗粒物和铅。
虚拟现实中生理测量、因素、方法和应用的系统评价
生理参数的测量提供了一种客观的、通常是非侵入性的、(至少是半)自动的用户行为评估和利用方法。此外,虚拟现实 (VR) 的特定硬件设备通常附带内置传感器,即眼动追踪和运动传感器。因此,生理测量和 VR 应用的结合似乎很有前景。已有多种方法研究了这种组合对各种应用领域的适用性和好处。然而,可能的应用领域范围,加上潜在有用和有益的生理参数、传感器类型、目标变量和因素以及分析方法和技术是多种多样的。本文对 VR 中生理测量的使用情况进行了系统概述和广泛的最新回顾。我们确定了 1,119 项在 VR 中使用生理测量的作品。在这些作品中,我们确定了 32 种专注于对 VR 应用中常见的体验特征进行分类的方法。本综述的第一部分根据应用领域(即治疗、培训、娱乐、交流和互动)以及生理参数测量的特定目标因素和变量对 1,119 篇作品进行了分类。附加类别总结了适用于所有特定应用领域的通用 VR 方法,因为它们针对的是典型的 VR 品质。在本综述的第二部分,我们分析了用于自动分析和潜在分类的各自方法的目标因素和变量。例如,我们重点介绍了哪些测量设置已被证明足够敏感,可以区分虚拟领域中不同程度的唤醒、效价、焦虑、压力或认知工作量。这项工作可能对所有想要在 VR 中使用生理数据并希望很好地了解以前采用的方法、它们的优点和潜在缺点的研究人员有用。

论文:一种用于量子程序的开源、工业强度优化编译器
嘈杂的中型量子 (NISQ) 计算机是一个活跃的研究领域。新的量子计算机架构有时是制造过程逐步改进的结果,有时是量子比特技术本身的范式转变。虽然每种新架构在计算意义上都是通用的,但它们设计的无常性挑战了人们为它们编写软件的能力。与传统计算机的情况一样,编译器的作用是减轻这一挑战。量子计算机的软件最好以对程序员来说最简单、最直接的方式编写,而不一定需要了解目标架构的细节。然后,编译器的工作就是生成该软件的有效且适当的表达,该表达考虑到目标架构的细节。在本文中,我们介绍了 Quilc,这是一个开源 4 软件应用程序,用于将用 Quil [ 3 , 24 ] 编写的量子程序编译为优化程序,该程序以目标量子计算机架构的本机操作表示。 Quilc 不需要(实际上也没有办法接受)用户关于细粒度编译策略的指令。相反,它使用 Quilc 必须为其编译用户程序的体系结构的简单描述。体系结构描述语言足够通用,可以处理迄今为止大多数制造的基于门的计算机体系结构,并且可以预测新的体系结构。出于这些原因,我们说 Quilc 是自动的和可重定向的。Quilc 不仅仅是一个桌面计算器(避免进行手动重复计算的便利),因为它充当了有关程序编译的知识库,并且能够综合这些信息来发现量子程序的非平凡表达式。我们在第 5 节中提供了这方面的示例。它也是生产级的,并且是 Rigetti Computing 软件堆栈的重要组成部分。本文的结构如下。首先,在第 2 节中,我们概述了 Quilc,包括与编译有关的量子架构的数学公式。第 3 节使用此形式来描述 Quilc 如何实现可重定向性,其高级概述见

机器学习模型:英语论文文本内容特征提取和自动评分的研究
英语论文是英语学习的关键部分,反映了学生运用英语技能的整体能力。因此,对英语论文的准确评分至关重要[1]。传统的评估方法涉及教师的手动分级,这很耗时,可能无法为每个学生提供个性化评估,尤其是在面对大量学生时[2]。机器学习算法的出现提供了一种自动评分英语论文的方法。自动论文评分的机器学习算法的基本原理是使用大量的预定论文数据集来训练该算法以学习评分模式并将其应用于未知文章。将机器学习应用于自动的英语论文评分可以使评分更加客观和高效,从而节省了教师的时间和精力[3]。但是,在捕获诸如写作样式和上下文之类的主观信息时,将机器学习用于自动评分仍然存在局限性。需要进一步改进算法以说明这些主观元素。McNA-MARA [4]研究了层次分类方法在自动论文评分中的应用,并证明了该方法在论文评分领域的有效性。li [5]提出了一种使用神经网络自动中文论文评分的新模型,该模型应用BERT网络以获取文章的句子向量,然后使用两层双向双向短期内存(BI-LSTM)提取文章向量。实验结果表明,该模型的性能比其他基线方法更好。hao [6]提出了一个加权有限状态自动机系统,并利用了渐进的潜在语义分析来处理大量论文。实验结果验证了系统的有效性。本文简要介绍了用于英语论文的基于XGBoost的自动评分算法,并引入了LSTM语义模型,以从论文中提取语义评分功能,以提高算法的准确性。最后,在模拟实验中,使用五种主题赋予的论文将优化的XGBoost算法与传统的XGBoost和LSTM算法进行了比较。

IACUC 政策 研究设备消毒 2024-DEC
目的 本文件概述了确保对动物研究中使用的无法通过机械笼子清洗处理的约束、丰富和其他设备进行适当消毒的程序和职责。此类设备由非集中区域、实验室、卫星空间的研究人员使用和消毒,不包括比较医学部 (DCM) 维护的设备。 政策必须每年定量评估接触动物或尸体的研究设备(包括但不限于约束、丰富和其他设备)适当消毒的质量保证。 背景 清洁和消毒对于防止研究对象之间交叉传播或接触微生物、排泄物、生物液体和信息素以及去除与人类共享的工作环境中的这些物质以及过敏原是必不可少的。当辅以机械擦拭或擦洗以去除有机物和其他污物时,有效的消毒从定义上来说是消灭无生命物体上的营养微生物。用热水和清洁剂或消毒剂手工对笼子和设备进行消毒也是一种有效方法,但需要非常注意细节。无论消毒过程是自动的还是手动的,都建议定期评估消毒效果。职责:首席研究员负责对实验室中的所有设备和工作表面以及动物饲养箱中可能与动物接触的实验室设备进行消毒,这些设备和设备在使用前和使用后都应进行消毒。首席研究员需要保存一份日志表,记录所有物种的设备清洁日期。IACUC 至少每三年需要监测一次当前正在使用的实验设备的消毒效果。此外,IACUC 将在例行实验室检查期间审查实验室日志,以确保定期进行消毒。首席研究员需要在设备入库前和出库后使用前对其进行消毒。一般消毒程序所有便携式和固定设备以及与动物接触的表面必须在工作人员每次使用之前和之后进行清洁和消毒

皮质脊髓对人类行走的控制 - Charles Capaday
人类行走有四个主要步态特征:(1)人类用两条腿直立行走,(2)与地面接触时腿几乎完全伸展,(3)脚后跟先着地(跖行步态),以及(4)在后期摆动阶段,身体的重心(COG)位于支撑面之外。相比之下,双足步行机器人的重心,如 Mark Tilden 的 Robosapien 和本田更复杂的 Asimo,则始终位于支撑面之内。由于人类步态的直腿特性,在脚后跟接触时伸肌和屈肌的激活是混合的,并且各个腿部伸肌的活动并不同步。踝关节伸肌活动延迟,发生在脚后跟接触之后,此时大多数其他腿部伸肌的活动已经停止(Capaday,2002)。在其他哺乳动物中,例如猫,当脚第一次接触地面时,腿部伸肌的活动是同相的(趾行步态)。亚历山大(Alexander,1992)认为,人类直腿行走的特点是将腿像支柱一样使用,从而最大限度地减少了肌肉活动。鸟类用两条腿走路,但采取蹲姿。企鹅比其他鸟类走路更直立,但它们仍然采取蹲姿,并且像其他鸟类一样,用脚尖走路。因此,除了一些猴子和猿类偶尔采用类似的步态外,直立、双足、跖行步态模式是人类独有的,其神经控制需要根据其自身条件来理解(Capaday,2002)。在这里,我以批判的方式回顾了关于运动皮层(MCx)在人类行走过程中的作用的研究,以及与 MCx 控制相关的某些脊髓反射机制方面。提出 MCx 在行走等看似自动的任务中发挥作用似乎令人惊讶,但这样做是有充分理由的。MCx 不仅发出自愿运动指令,而且还介导对上肢肌肉伸展的反射样反应(Matthews 等人,1990 年;Capaday 等人,1991 年)和接触放置等综合反应(Amassian 等人,1979 年)。从皮质脊髓束 (CST) 损伤导致的运动缺陷来看,其重要性随着系统发育顺序的增加而增加(Passingham