XiaoMi-AI文件搜索系统
World File Search System视觉的

基于动态视觉的隧道门户的审美评估及其影响因素的研究
随着现代城市,道路和景观的发展,对于隧道等基础设施来说,提供一种令人愉悦的体验变得越来越重要。在这方面,有必要进行研究研究隧道门户使用美学研究的研究。关于隧道门户的审美评估,本文从驾驶员的角度完全考虑了动态视觉效果。这项研究包括搅拌机,Speedtree Modeler Cinema,Adobe Photoshop CS6和其他用于二级开发的软件的使用。这些程序连接到驾驶模拟平台欧洲卡车模拟器2(配备了驾驶模拟器),以构建一组驾驶模拟测试,以使隧道门户的审美评估。中国云南省的Funing -Longliu高速公路上的Banlun隧道被用作案例研究,其中包括在审美设计中差异很大的四个影响因素:门户网站的线性,颜色,绿色和质地。Using an orthogonal experimental design, the influence of the esthetic degree was simulated and evaluated, and the order of sensitivity to esthetic factors of a headwall tunnel portal was sequentially determined as follows: the portal texture exerts the maximum impact on the beauty degree of the headwall portal, fol- lowed by the portal greening and the portal color, while the portal linearity exerts the mini- mum impact.该测试系统在进行未来的评估和隧道门户审美学研究时可以用作参考。结果表明,开发的驾驶模拟测试系统可用于确定隧道门户的审美因子的敏感性,并在不同水平上获得美学因子的最佳搭配;因此,它提供了用于设计最佳美学隧道门户的反馈。

使用自适应路径计划对机器人视觉的积极学习
摘要 - 机器人需要强大而灵活的视觉系统,以感知和理由以超出几何形状。大多数此类系统以深度学习方法为基础。由于自主机器人通常在最初未知的环境中部署,因此在静态数据集中进行的预训练不能总是捕获各种域,并限制在任务期间机器人的视力性能。最近,出现了自我监督以及充分监督的主动学习方法,以改善机器人视觉。这些方法依赖于大型内域预培训数据集或需要大量的人类标签工作。为了解决这些问题,我们提出了一个最新的自适应计划框架,用于有效的培训数据收集,以大大减少语义地形监测任务中的人类标签要求。为此,我们将高质量的人类标签与自动生成的伪标签相结合。实验结果表明,该框架达到分割性能,接近完全有监督的方法,人类的标签工作急剧减少,同时超出了纯粹的自我监督方法。我们讨论了当前方法的优势和局限性,并概述了未知环境中更健壮和灵活的机器人视觉系统的宝贵未来研究途径。

基于Edgeml和计算机视觉的印刷电路板中的缺陷检测
在工业环境中,生产高质量的印刷电路板(PCB)对于确保可靠的产品到达最终客户至关重要[1]至关重要。质量控制部门旨在根据预先建立的标准确保和执行工业过程的每个阶段的合规性。部门负责通过采样来对产品进行功能测试和视觉检查,这是一项经常手动的任务,依赖于员工的重点和解释。这可能会导致人类错误或未发现的缺陷,这些缺陷落在抽样之外[2]。行业4.0技术的集成,例如物联网(IoT),人工智能(AI)和云计算,在优化和确保过程中的可靠性方面起着重要作用[3]。机器学习模型处理和分析大量数据和识别模式的技术能力使得能够准确区分有缺陷的和非缺陷的PCB,检测到未安装的或错误安装的组件,甚至识别痕迹中的缺陷,例如开路通行器或短路或短路。这项技术使基于样本的检查不必要,因为可以单独分析每个生产的董事会。这项工作旨在调查不同的卷积神经网络架构,以表征工业过程中PCB中的组装缺陷。
使用Mediapipe进行统一的计算机视觉的空气画布...
摘要:在本文中,我们使用Mediapipe使用MediaPipe使用Unity Game Engine介绍了用于在3D环境中的计算机视觉的实现。在我们以前的工作中,我们发现,无论最初的参数如何,模拟通常都会导致快速灭绝。在此模型中,我们实施了与Unity的3D世界集成的空气画布和计算机视觉系统。我们的目标是通过合并3D演化来实现系统稳定,长期操作和更现实的模拟。使用Unity Game Engine,我们根据人工或现实世界地图创建并管理了一个封闭的3D生态系统环境。对生态系统的模拟和生成的数据分析可以作为进一步研究的起点,尤其是在可持续性方面。我们的系统公开访问,允许用户自定义和上传其参数,地图和对象,并定义继承和行为模式,从而使他们能够根据生成的数据来测试其假设。本文的目标不是创建和验证模型,而是提供IT工具。对于进化研究人员,该系统允许创建和呈现模拟,包括动画会议演示文稿,以增强可视化和参与度。使用3D模拟对于教育目的特别有价值,吸引学生并增加对3D互动世界的兴趣。学生可以观察生态系统的行为,自然选择如何支持适应性以及竞争如何影响物种。关键字:空气画布,计算机视觉,统一,3D模拟,生态系统

基于视觉的自适应机器人技术用于自主表面裂纹修复
基础设施中的抽象表面裂纹如果没有有效维修,可能会导致明显的恶化和昂贵的维护。手动修复方法是劳动力密集的,耗时的,不精确的,因此很难扩展到大面积。尽管机器人感知和操纵的进步已经进行了自主裂纹修复的进展,但现有方法仍然面临三个关键挑战:(i)在机器人的坐标框架内准确定位裂缝,(ii)对改变裂纹深度和宽度的适应性,以及(iii)在现实情况下对修复过程的验证。本文使用具有先进感应技术的机器人技术提出了一种自适应的自主系统,用于表面裂纹检测和修复,以增强人类的精度和安全性。系统使用RGB-D摄像头进行裂纹检测,用于精确测量的激光扫描仪以及用于材料沉积的挤出机和泵。为了应对关键挑战之一,激光扫描仪用于增强裂纹坐标以进行准确定位。此外,我们的方法表明,一种自适应裂纹填充方法比固定速度方法更有效,更有效,实验结果证实了精度和一致性。此外,为了确保现实世界的适用性和测试可重复性,我们使用3D打印的裂纹标本引入了一种新颖的验证程序,以准确模拟现实世界中的条件。关键字:机器人基础设施维护裂纹维修自适应维修最终效果设计计算机视觉1.这项研究通过证明自适应机器人系统如何减少对手动劳动的需求,提高安全性并提高维护操作的效率,最终为更复杂和集成的建筑机器人铺平道路,从而为建筑中人类机器人相互作用的发展贡献。在基础设施维持领域的引入,有效的检测和修复表面裂纹是最持久和最具挑战性的问题之一。表面裂纹通常是非结构性的,但由于水分或化学入口而导致长期恶化。随着时间的流逝,这些次要缺陷可能会传播并在结构上显着,可能导致昂贵的维修甚至灾难性的失败。传统的裂纹维修方法,例如倒入,填充,密封,压力倾泻和挖掘挖掘[1],在很大程度上依赖手动劳动,并且通常会导致不一致的维修质量,同时带来了主要的安全风险。此外,手动裂纹维修可能是一个耗时的过程,可能会导致受影响社区的恢复的重大延迟。,例如,从2016年到2018年,旧金山国际机场跑道的地表裂纹维修直接占有近半百万美元,

基于视觉的触觉智能,具有软机器人超材
机器人超材料代表了一种创新的方法,用于创建合成结构,将所需的材料特征与具体的智能结合在一起,模糊了材料和机械之间的边界。受到生物皮肤功能质量的启发,将触觉智能整合到这些材料中引起了研究和实际应用的重要兴趣。这项研究介绍了具有全向适应性和出色触觉感应的软机器人超材料(SRM)设计,结合了基于视觉的运动跟踪和机器学习。研究将两种感官整合方法与最先进的运动跟踪系统和力/扭矩传感器基线进行比较:具有高框架速率的内部视觉设计和外部视觉设计的成本效果。结果表明,内部视觉SRM设计达到了98.96%的令人印象深刻的触觉精度,实现了柔软和适应性的触觉相互作用,尤其对灵活的机器人抓握有益。外部视觉设计以降低的成本进行类似的性能,并且可以适应可移植性,从而增强材料科学教育和机器人学习。这项研究显着地使用了软机器人超材料中的基于视觉运动跟踪的触觉传感,以及GitHub上的开源可用性促进了协作并进一步探索了这种创新技术(https:// github .com /github .com /bionicicdl -sustech /sustech /softrobotictongs)。

水果和蔬菜采摘机器人机器视觉的关键问题和对策
近年来,国内人口股息逐渐消失,劳动力短缺问题已成为一种瓶颈,限制了农业发展,尤其是劳动密集型行业的发展。选择机器人技术已从前瞻性研究变为实际需求。以计算机图像处理技术,工业机器人技术和人工智能技术代表的高和新技术逐渐渗透到农业领域,采摘机器人的研究和开发已经进入了一个快速发展的时期。目前,国内外的许多企业都在开发水果和蔬菜采摘机器人,例如日本松下,美国在美国收获Croo机器人,以色列的Ffrobotics等。农业采摘机器人的工作环境非常复杂,采摘机器人需要从混乱的背景中找到随机分布的水果和蔬菜,包括分支和叶子,天空和其他干扰[1]。解决此问题的关键是将机器视觉系统引入采摘机器人,以使拾取机器人具有很高的识别率和定位准确性,并在非结构化的环境中实现自动导航。从搜索,扫描,识别,定位到最终效应器控制和操作中实现,并最终实现农作物的自动收获。例如,智能农业采摘平台

基于视觉的无人机传感系统实时空中物体定位与跟踪
摘要 —本文主要研究基于视觉的无人机导航障碍物检测与跟踪问题。通过将物体检测和跟踪有效地集成到动态卡尔曼模型中,开发了一种从单目图像序列中进行实时物体定位和跟踪的策略。在检测阶段,通过每帧图像背景连接线索计算出的显著性图自动检测和定位感兴趣的物体;在跟踪阶段,采用卡尔曼滤波器对物体状态进行粗略预测,然后通过结合显著性图和两个连续帧之间的时间信息的局部检测器进一步细化预测。与现有方法相比,所提出的方法不需要任何手动初始化跟踪,运行速度比同类最先进的跟踪器快得多,并且在大量图像序列上实现了具有竞争力的跟踪性能。大量实验证明了所提出方法的有效性和优异的性能。

基于机器学习和计算机视觉的牛品种识别和活重评估
本研究的目的是使用几种神经网络模型来估算奶牛的长重:卷积人工神经网络用于通过图片识别奶牛并确定其品种,随后通过立体视觉法确定其身体尺寸,随后利用多层感知器根据有关奶牛的品种和尺寸信息估算奶牛的长重。为了更准确地估计动物的身体参数,还使用了 3D 摄像头(Intel RealSense D435i)。应当注意,由于 3D 摄像头的分辨率低,单独使用不会产生良好的效果。因此,使用摄影测量法从不同角度拍摄的奶牛图像来确定奶牛身体参数。通过摄影测量获得了奶牛的肩高(WH)、臀高(HH)、体长(BL)和臀宽(HW)等参数。使用这些参数(输入参数 WH、HH、BL、HW 和输出参数 - LW),开发了基于 ANN 的模型估计。通过分析从不同角度同步摄像机拍摄的动物图像,可以确定奶牛的身体尺寸。首先,在图像中识别奶牛,并使用 Mask-rcnn 卷积神经网络确定其品种。然后通过立体视觉方法确定奶牛的肩高、臀高、身长和身宽,该方法可以获得数字图像中物体的几何参数并进行测量。数字成像和摄影测量处理包括几个完全确定的步骤,可以生成动物身体的三维或二维数字模型。然后将获得的有关物种及其大小的数据输入到预测模型,该模型确定动物的估计体重。
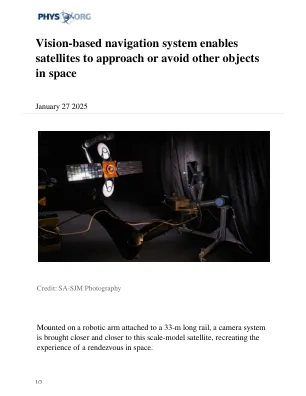
基于视觉的导航系统使卫星能够接近或避开太空中的其他物体
GNC 测试设施的 Joris Belhadj 补充道:“实验室的模型卫星(称为 BlackGEO)的制造包含了地球静止卫星地形的典型元素,并采用了包括多层绝缘和太阳能电池在内的典型卫星表面材料,以增强其光学代表性。这颗卫星也是由 Blackswan 根据 ESA 合同生产的,我们实验室的任何客户现在都可以使用它。”