机构名称:
¥ 2.0
基础设施中的抽象表面裂纹如果没有有效维修,可能会导致明显的恶化和昂贵的维护。手动修复方法是劳动力密集的,耗时的,不精确的,因此很难扩展到大面积。尽管机器人感知和操纵的进步已经进行了自主裂纹修复的进展,但现有方法仍然面临三个关键挑战:(i)在机器人的坐标框架内准确定位裂缝,(ii)对改变裂纹深度和宽度的适应性,以及(iii)在现实情况下对修复过程的验证。本文使用具有先进感应技术的机器人技术提出了一种自适应的自主系统,用于表面裂纹检测和修复,以增强人类的精度和安全性。系统使用RGB-D摄像头进行裂纹检测,用于精确测量的激光扫描仪以及用于材料沉积的挤出机和泵。为了应对关键挑战之一,激光扫描仪用于增强裂纹坐标以进行准确定位。此外,我们的方法表明,一种自适应裂纹填充方法比固定速度方法更有效,更有效,实验结果证实了精度和一致性。此外,为了确保现实世界的适用性和测试可重复性,我们使用3D打印的裂纹标本引入了一种新颖的验证程序,以准确模拟现实世界中的条件。关键字:机器人基础设施维护裂纹维修自适应维修最终效果设计计算机视觉1.这项研究通过证明自适应机器人系统如何减少对手动劳动的需求,提高安全性并提高维护操作的效率,最终为更复杂和集成的建筑机器人铺平道路,从而为建筑中人类机器人相互作用的发展贡献。在基础设施维持领域的引入,有效的检测和修复表面裂纹是最持久和最具挑战性的问题之一。表面裂纹通常是非结构性的,但由于水分或化学入口而导致长期恶化。随着时间的流逝,这些次要缺陷可能会传播并在结构上显着,可能导致昂贵的维修甚至灾难性的失败。传统的裂纹维修方法,例如倒入,填充,密封,压力倾泻和挖掘挖掘[1],在很大程度上依赖手动劳动,并且通常会导致不一致的维修质量,同时带来了主要的安全风险。此外,手动裂纹维修可能是一个耗时的过程,可能会导致受影响社区的恢复的重大延迟。,例如,从2016年到2018年,旧金山国际机场跑道的地表裂纹维修直接占有近半百万美元,
基于视觉的自适应机器人技术用于自主表面裂纹修复
主要关键词



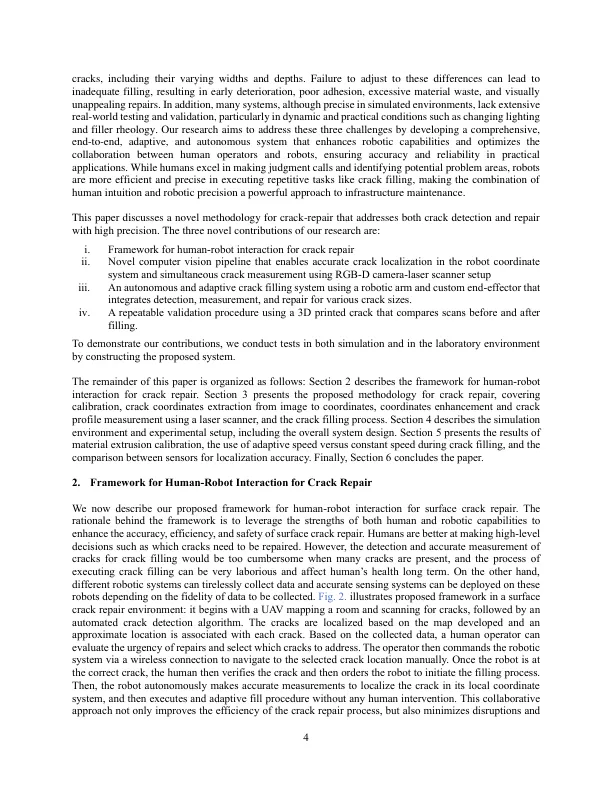
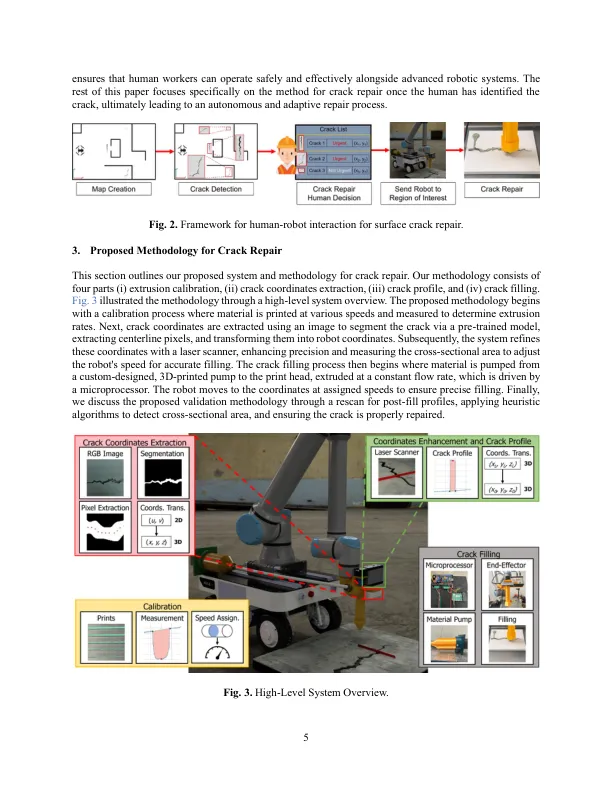
相关文件推荐