机构名称:
¥ 1.0
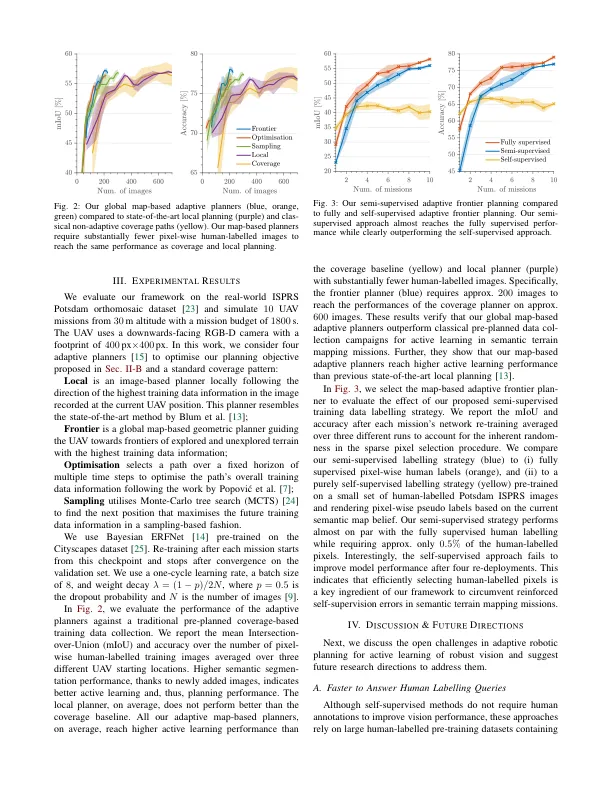
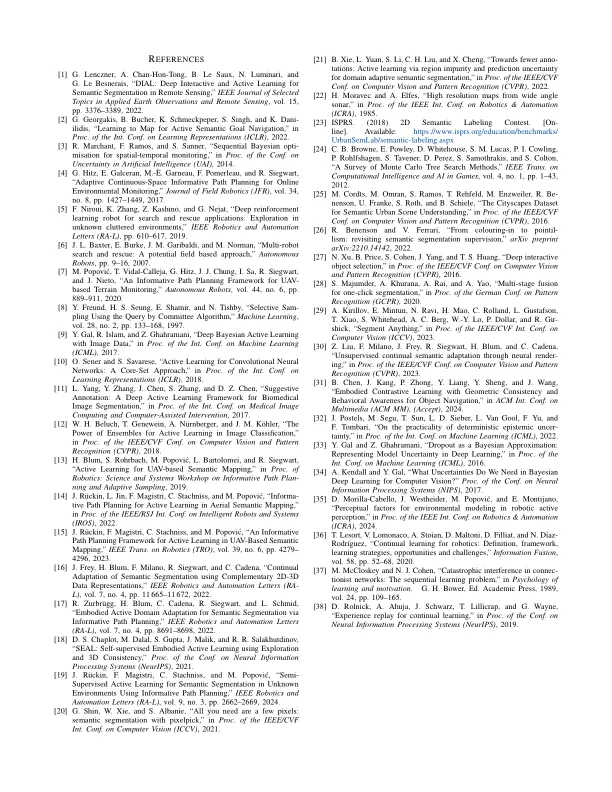
摘要 - 机器人需要强大而灵活的视觉系统,以感知和理由以超出几何形状。大多数此类系统以深度学习方法为基础。由于自主机器人通常在最初未知的环境中部署,因此在静态数据集中进行的预训练不能总是捕获各种域,并限制在任务期间机器人的视力性能。最近,出现了自我监督以及充分监督的主动学习方法,以改善机器人视觉。这些方法依赖于大型内域预培训数据集或需要大量的人类标签工作。为了解决这些问题,我们提出了一个最新的自适应计划框架,用于有效的培训数据收集,以大大减少语义地形监测任务中的人类标签要求。为此,我们将高质量的人类标签与自动生成的伪标签相结合。实验结果表明,该框架达到分割性能,接近完全有监督的方法,人类的标签工作急剧减少,同时超出了纯粹的自我监督方法。我们讨论了当前方法的优势和局限性,并概述了未知环境中更健壮和灵活的机器人视觉系统的宝贵未来研究途径。
使用自适应路径计划对机器人视觉的积极学习
主要关键词



相关文件推荐