XiaoMi-AI文件搜索系统
World File Search System轨迹
使用接触图生成蛋白质折叠轨迹...
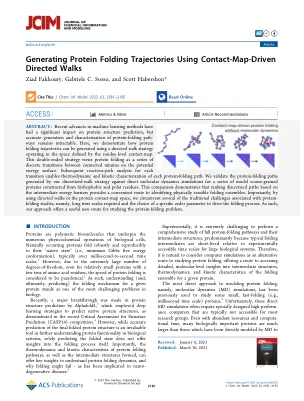
摘要:机器学习方法的最新进展对蛋白质结构预测产生了重大影响,但准确生成和表征蛋白质折叠途径仍然难以实现。在这里,我们展示了如何使用在残基级接触图定义的空间中运行的定向行走策略生成蛋白质折叠轨迹。这种双端策略将蛋白质折叠视为势能表面上连接最小值之间的一系列离散转换。随后对每个转换进行反应路径分析,可以对每条蛋白质折叠路径进行热力学和动力学表征。我们根据由疏水和极性残基构成的一系列模型粗粒度蛋白质的直接分子动力学模拟,验证了我们的离散行走策略生成的蛋白质折叠路径。这种比较表明,基于中间能量屏障对离散路径进行排序为识别物理上合理的折叠集合提供了一种方便的途径。重要的是,通过在蛋白质接触图空间中使用定向行走,我们绕过了与蛋白质折叠研究相关的几个传统挑战,即需要较长的时间尺度和选择特定的顺序参数来驱动折叠过程。因此,我们的方法为研究蛋白质折叠问题提供了一种有用的新途径。■ 简介

乌克兰战争如何影响北约未来轨迹和凝聚力
的景观,其中欧洲人对威胁的看法因他们的历史经验而大不相同。当东欧国家试图加入北约以成为其集体防御条款的一部分时,在许多西欧国家,军事威胁并不被视为主要威胁,民众变得更加和平主义。关于西欧和平主义背后的原因,很少有出色的解释,其中之一就是北约提供的长期军事安全。1 了解这一现象对于掌握欧洲后冷战安全动态非常重要。今天在任的大多数西欧决策者都是在二战后的大陆上长大的,这个大陆被分裂,他们国家的安全由美国和北约保证,它们用核威慑遏制了俄罗斯。

用于到达和接近的 4D 轨迹协商协议...
最后,由于到达阶段环境条件的变化(主要是天气条件),需要采取后续空中交通管制行动来解决由飞机预测的 4D 轨迹上的意外变化引起的冲突。对这些控制行动进行自动决策并非易事,而且超出了本文的目标。一些作者(即14 )提出了基于模糊逻辑方法的战术行动。但是,为了最大限度地减少进近区的战术控制,可以通过在飞机到达上述区域之前执行的第二个谈判过程(进近谈判)来方便地制定新的战略行动。根据以前关于进近区飞机调度的工作,在外部米定位点和米定位点之间定义了一个新的时间边界(冻结范围)。15 冻结地平线用作新的时间限制,ATC 控制可以在此时间限制内启动新的地空协商,以便将飞机的预定到达时间 (STA) 更改为仪表定位点,并将其他合并点更改为进近区域。

沿进球轨迹组织的地点领域通过增强学习
当啮齿动物学习目标导航时,在奖励地点形成了位置场的高度确定性,并且该田地的宽度和偏向运动方向而增加。但是,在任务学习过程中表征现场分布的规范框架仍然难以捉摸。我们假设观察到的位置场动力学是国家表示学习的一个特征,该学习有助于政策学习最大化强化学习。我们开发了一种使用高斯基函数的代理来对直接突触到策略网络的位置字段进行建模。每个字段的中心,宽度和幅度均可通过试用试验更新策略参数,以最大程度地提高累积折扣奖励。当经纪人学习在具有障碍的一维轨道或二维环境中导航到目标时,较高数量的高斯田地在目标附近组织起来,而其余的田地则在宽度上增加了目标轨迹。我们表明,如有效的编码假设所指出的那样,该位置在位置的频率与该位置的田间密度之间的相关性增加。此外,高斯磁场沿着目标轨迹聚集的位置伸长,具有相似的作用,类似于成功的映射。我们进一步表明,当基本函数的数量较低时,该学到的地图有助于更快的策略收敛。得出结论,我们开发了一个规范模型,该模型概括了几个hip-pocampus位置领域学习动力学,并统一替代建议,以为未来的实验提供可测试的预测。

自动驾驶汽车的时间 - 最佳轨迹计划和跟踪
摘要:本文提出了一个用于自动驾驶汽车轨迹计划和跟踪的层次控制框架,以应对准确遵循高速,限制性操作的挑战。提出的时间优势轨迹计划和跟踪(TOTPT)框架利用层次控制结构,具有离线轨迹优化(TRO)模块和在线非线性模型预测性控制(NMPC)模块。TRO层使用直接搭档方法生成最小单圈时间轨迹,该方法优化了车辆的路径,速度和控制输入,以达到最快的圈速时间,同时尊重车辆动力学和轨道约束。NMPC层负责准确跟踪TRO实时生成的参考轨迹。NMPC还结合了一种预览算法,该算法利用预测的未来旅行距离来估算下一个时间步骤的最佳参考速度和曲率,从而改善了整体跟踪性能。在加泰罗尼亚电路上的仿真结果证明了该框架以平均速度为116 km/h准确地遵循时间优势的赛车的能力,最大侧向误差为0.32 m。 NMPC模块使用具有实时迭代(RTI)方案的ACADOS求解器来实现毫秒级计算时间,从而可以在自动驾驶汽车中实时实施它。

智能机器人和机电系统系统的轨迹计划
轨迹规划对于智能机器人和机电系统的研究是一个至关重要的,具有挑战性的问题,这些问题在现代制造过程中起着举足轻重的作用,尤其是在工业4.0的框架内[1]。的确,在每个机器人应用中,不仅需要定义一条路径,还需要根据任务要求和机器人的限制来保证系统可行且安全的操作[2]。在文献中已经开发和调查了许多解决轨迹计划问题的方法,其应用涵盖了工业,协作以及更一般的自主和智能机器人和机电系统[3,4]。可以通过考虑不同的目标来计划机器人系统的运动定律。可以评估适当的运动定律的设计,例如,与机器人或机电系统系统的摄入量有关,因此,可以根据机器人在时间消耗方面的最佳性能来确定最佳轨迹[5-7]。应用的另一个有趣的领域是振动还原。的确,许多自动机器和机电应用需要在规定的操作期间平滑而混蛋的轨迹[8-10]。此外,工业机器人技术的新兴方案,例如协作机器人技术和人类机器人的互动,要求对机器人轨迹计划进行高级策略,以确保在与人类操作员一起工作的机器人执行任务期间的平稳性,安全性和流利性[11-13]。最后,机器人和机电系统系统的轨迹计划也与此类系统的运动控制问题紧密相结合,以确保执行所需的运动法的高性能[14,15]。在本期特刊中,我们邀请了研究人员为智能机电系统,自主机器,工业和协作操纵器以及可移动和可重新配置的机器人提供与智能机电系统,自主机器,工业和协作机器的轨迹计划有关的文章做出贡献。已经寻求了有关这些主题的原始研究论文,重点介绍了这些主题的理论研究和现实世界的应用。合适的主题包括但不限于以下内容:路径和轨迹计划,动态建模,能源效率,振动抑制,平滑轨迹,运动曲线优化,运动控制,智能机器人和机电系统,协作机器人系统,协作机器人技术以及人类 - 机器人相互作用的运动计划。
GTO 至 GEO 最佳轨迹剖面图和电力推进系统配置
摘要 — 快速可靠的优化轨道转移计算方法对于初始阶段的项目至关重要。它们可以对推进子系统(卫星设计的主要组件之一)进行初步的、现实的规模估算。这篇论文由 ReOrbit Oy 完成,提出了一种最短时间的最优轨道,用于将微型卫星从 GTO 轨道提升到 GEO,假设通过电力推进连续发射。根据此模拟得出的 ∆ v 要求,选择合适的电力推进系统,并详细说明其配置在燃料和推力要求方面的设计。这是通过考虑轨道提升带来的主要贡献,以及 10 年寿命期间每天进行两次的轨道机动所产生的附加物,如位置保持修正和反作用轮去饱和。优化方法是低推力轨道机动的直接-间接混合方法,采用庞特里亚金最小原理将其转录为非线性规划问题。利用 Lyapunov 控制理论获得启动优化器所需的初始猜测。实施轨道平均技术,能够在优化过程中快速计算多条轨迹。动态模型包括 J 2 纬向谐波、太阳辐射压力、太阳和月亮的第三体效应以及高达 1500 公里的大气阻力等干扰。利用圆柱形阴影模型评估日食条件,因为在地球阴影中,太阳能电力推进会经历零推力期。电力推进系统配置是通过权衡研究和不同供应商之间的比较来确定的。选定的方案包括 4 个氙气推进器,配备互补的电源处理单元和推进剂管理系统,总转移时间不到 4 个月。通过在 GEO 中改变推进器的配置,转移轨迹和在轨机动都使用相同的推进系统。

黑色素瘤细胞对靶向治疗耐药性的单细胞轨迹
摘要 目的:细胞异质性被认为是影响恶性黑色素瘤治疗反应和耐药性的主要因素。单细胞测序技术的最新发展为这些机制提供了更深入的见解。方法:在这里,我们通过单细胞 RNA 测序分析了不同条件下的 BRAF V600E 突变黑色素瘤细胞系:对 BRAF 抑制剂维莫非尼抑制 BRAF 敏感的细胞和对单独使用维莫非尼或维莫非尼与 MEK1/2 抑制剂考比替尼或曲美替尼联合使用 BRAF 抑制产生耐药性的细胞。通过 t 分布随机邻域嵌入和自组织映射进行降维,确定了不同的耐药性发展轨迹,在细胞和基因状态空间中将 4 种治疗条件清楚地分开。结果:与单一药物治疗耐药性相关的轨迹涉及细胞周期、细胞外基质和去分化程序。相反,在双重耐药细胞中检测到的变化主要影响翻译和丝裂原活化蛋白激酶途径的再激活,其中一小部分亚群显示出多能性标志。这些发现在伪时间分析和 RNA 速度测量中得到了验证。结论:本文报道的单细胞转录组分析采用了一系列生物信息学方法来识别黑色素瘤对单一和双重药物治疗的耐药机制。这项研究加深了我们对治疗诱导的黑色素瘤细胞重编程和可塑性的理解,并确定了与治疗耐药性管理可能相关的目标。关键词黑色素瘤;单细胞转录组测序;治疗反应

CISLUNAR轨迹维护的生命和操纵检测模式
对Cislunar操作的兴趣增加需要将太空域的意识能力扩展到地球的地球范围内。成功的太空领域意识需要对空间对象行为的知识和分类。此信息可以用作未来和当前任务计划的决策工具。通过发展描述性生活模式来获取空间对象行为的信息的方法。生活的描述模式从空间对象建立了一组预期的动作或运动。这项研究开发了生活的描述性电气化模式,用于在Earth-moon系统中L1和L2 Lagrange点附近重复自然轨迹。a L 2最佳模型预测控制和冲动控制器被实现,以在高层象征的模型中维护所需的轨迹。证明了基于最佳控制的估计器可检测电气维持操作,并实现了一级支持向量分类器,以确定空间对象相对于既定的固定存储模式的空间对象的异常行为。

阿波罗11重新加载:基于优化的轨迹重建
I.介绍1969年7月20日,标志着人类历史上的历史成就。第一次,两个人走在一个不是地球的天体上,固定了人类探索史上的基本里程碑。这一成功是从技术和经济的角度来达到巨大的效果,是美国实现的,以应对苏联太空计划的较早成功,这是由创建和成功启动的第一次创建和成功启动的空间,并与1957年的Sputnik一起,并在1957年及其造成的交流[1,2],以及1,2],又是2 [1,2],又有一个人的交流。 Vostok 1,Yuri Gagarin,1961年[3]。这是历史上遇到的第一个正式步骤[4],尤其是月球竞赛[5]。尽管有最初的技术差距,但多年来,美国太空的进步取得了动力,而Apollo任务的设置[6]代表了整个美国太空计划的最高点。能够实现这样一个目标,需要开发几种新技术。当然,有能力计算能够满足整个任务的所有要求的轨迹。这在Apollo指导计算机的可用计算能力方面和用于指导土星V [8]的发射车数字计算机方面有严格的要求。在发动机切割之前的最后几秒钟进行了特殊护理,以避免溶液中的奇异性。在这种情况下,我们可以将数值优化通常放在[13]中,尤其是直接方法[14]。在上升指导中,火箭采用了所谓的迭代路径自适应指导,利用了最佳控制理论[9],并修改了切线线性转向定律的修改版本,在此期间,其参数经常更新。另一个基本阶段由翻译注射(TLI)的动作表示,该动作使航天器能够离开地球范围的侵入范围到达月球。对于阿波罗11(Apollo 11),设想将哥伦布模块放在自由回报路径上[10],并且此选择需要在机动末端满足的准确态度和位置条件。第三个也是最重要的阶段是月球着陆:鉴于上述计算局限性,NASA工程师在承诺,创造力和专有技术方面对其进行了补偿。这种态度的一个绝妙的例子是基于多项式方案的月球着陆指导,尽管其计算复杂性低[11],但它的电子趋势形式也是最佳的[12]。然而,在过去几十年中,在计算能力和开发的重新构建优化算法方面取得的进展极大地扩展了当今可用的大量方法和工具,以分析相同的问题。在解决最佳控制问题的直接方法中,伪谱方法占据了相关位置。在本文中,我们希望通过使用Spartan [19,24,25]来重建Apollo 11任务的三个关键阶段这些方法[15],基于用于转录问题的时间步长的不均匀分布,事实证明对大型最佳控制问题[16]非常有效,包括国际空间站的零促性剂重新定位[17]。进一步的应用涉及大气进入指导[18,19],火星下降和小行星着陆轨迹计算[20],月球着陆可及性分析[21],卫星在椭圆轨道上的态度稳定[22]和飞机轨迹产生问题[23]。