XiaoMi-AI文件搜索系统
World File Search System运动控制

使用 32 实现 S 曲线运动控制...
许多机电一体化应用需要执行器快速而精确地从一个点移动到另一个点。应避免执行器机构中的冲击,最好平稳运行;这些要求在运动开始时更难满足,尤其是对于使用步进电机实现的执行器,其运动分为离散部分。软启动操作是此类系统的良好解决方案,该技术涉及开始时较慢的运动,速度和加速度受控(有限)。软启动操作的良好实现是 S 曲线,它提供有限的速度、加速度和冲击 ([1])。在运动开始时,速度很慢,但逐渐增加到最大值;在运动结束时,速度开始以同样的方式降低。在典型的机械运动中,S 曲线轮廓的时间跨度为 0.5 秒是一个不错的值。考虑到这个参数,可以从三角函数中获得 S 曲线,如公式 (1) 所示:
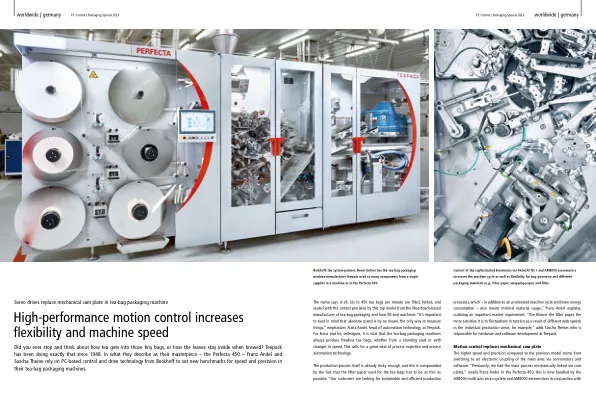
高性能运动控制提高了灵活性和机器速度
您是否曾经停下来考虑茶如何进入那些小袋子,或者在冲泡时叶子如何留在里面?Teepack自1948年以来一直在做。在他们所说的杰作中 - 完美450 - 弗朗兹·安德尔(Franz Andel)和萨斯卡(Sascha Theine)依靠贝克霍夫(Beckhoff)的基于PC的控制和驱动技术来为他们的茶袋包装机中的速度和精度设定新的基准。
BCI -Obotics的新兴趋势用于运动控制和...
神经工程研究表明,有希望使用大脑计算机界面(BCI)来增强运动障碍患者的功能恢复和独立性。通过转移大脑活动,BCI绕过受损的神经运动系统,以控制计算机/机器。BCI控制的机器人设计用于运动援助,以帮助瘫痪的患者以及康复以增强运动恢复。在本文中,我们回顾了BCI和大脑控制的机器人技术在过去五年中康复和下肢运动功能的康复和协助。文章强调了BCI控制的机器人技术的新兴趋势,以扩大其干预能力以及解决现有的挑战,阻碍了其广泛的临床使用。

无线手部运动控制机器人夹持臂
在各种自动化行业中,无线活动是必需的,特别是在危险或危险区域的偏远地区。在许多行业中,需要处理一些非常热的工作,而人手无法做到,在这种情况下,无线操作效率更高。该项目专注于使用微控制器在 X-bee 和无线传感器网络的帮助下设计手势控制的机械臂。它由两部分组成,通过无线传感器通信系统相互连接。X-bee 将充当发射器和接收器设备系统。主要部分由装有锂离子电池、微控制器和柔性传感器的手套组成。第二部分由电机、微控制器和机器人手指组成,机械动作通过它们发生。

基于数字双胞胎的机器用于罂粟机器人的运动控制...
智能制造的关键组成部分是第四次工业革命时代的中心概念,由数字双技术,AI和计算机视觉技术组成。在这项研究中,这些技术被用来管理罂粟机器人,这是一种用于教育和研究目的的人形机器人。数字双胞胎创建了一个虚拟环境,能够对机器人动作进行实时模拟,分析和控制。机器人的数字双胞胎是使用3D开发程序Unity构建的。运动数据是在模拟虚拟机器人的物理结构和运动时捕获的。然后将这些数据馈送到基于张量的深神经网络中,以生成一个回归模型,该模型根据机器人手的位置预测运动旋转。通过将此模型与基于Python的机器人控制程序集成,可以有效地管理机器人的运动。此外,使用OpenPose(一种计算机视觉算法)控制了机器人,该算法预测了人体上的特征点。从2D图像中收集了人类关节点的位置数据,并根据此数据计算运动角度。通过在实际机器人上实施这种方法,可以使机器人复制人类运动。

模拟代理中的可供性和主动运动控制推理
灵活、目标导向的行为是人类生活的一个基本方面。基于自由能最小化原理,主动推理理论从计算神经科学的角度形式化了这种行为的产生。基于该理论,我们引入了一种输出概率、时间预测、模块化的人工神经网络架构,该架构处理感觉运动信息,推断其世界中与行为相关的方面,并调用高度灵活、目标导向的行为。我们表明,我们的架构经过端到端训练以最小化自由能的近似值,开发出可以解释为可供性图的潜在状态。也就是说,新出现的潜在状态根据本地环境发出信号,表明哪些动作会导致哪些效果。结合主动推理,我们表明可以调用灵活的、目标导向的行为,并结合新出现的可供性图。因此,我们的模拟代理可以灵活地穿越连续空间,避免与障碍物发生碰撞,并首选能够以高确定性到达目标的路径。此外,我们还表明,学习后的代理非常适合跨环境进行零样本泛化:在少数固定环境中训练代理后,这些环境中的障碍物和其他地形会影响其行为,它在程序生成的环境中的表现同样出色,这些环境包含不同数量的障碍物和不同位置的各种大小的地形。

用于运动控制和康复的 BCI 机器人的新兴趋势
摘要 过去二十年来,神经工程学研究已为利用脑机接口 (BCI) 增强运动障碍患者功能恢复和独立性提供了有希望的证据。通过翻译大脑活动,BCI 绕过受损的神经运动系统来控制计算机/机器。BCI 控制的机器人旨在为瘫痪患者提供运动辅助,并用于康复以增强运动恢复。在本文中,我们回顾了过去五年来 BCI 和脑控机器人在康复和辅助上下肢运动功能方面的进展。本文强调了 BCI 控制机器人的新兴趋势,以扩大其干预能力并解决阻碍其广泛临床应用的现有挑战。

增强学习基于复杂环境中蛇机器人的运动控制
抽象的蛇机器人由于其特殊的身体和步态而变得富裕。但是,由于其复杂的模型,很难计划在多孔环境中进行运动。为了解决这个问题,这项工作研究了一种基于学习的运动计划方法。为可行的路径计划,并提出了一种修改的深Q学习算法,提出了一种弗洛伊德移动的平均算法,以确保蛇机器人通过的路径的平稳性和适应性。一种改进的路径积分算法用于解决步态参数以控制蛇机器人以沿计划的路径移动。为加快参数的训练,设计了一种结合串行训练,并行培训和经验重播模块的策略。此外,我们设计了一个运动计划框架,包括路径计划,路径平滑和运动计划。进行了各种模拟,以验证所提出的算法的效果。
进化,生物力学和神经生物学收敛以解释选择性手指运动控制
沿进化量表相对有选择地移动纤维的能力增加了。,即使在人类中,当一个数字移动时,其他数字也会移动。意想不到的数字运动的部分原因是手的生物力学及其肌肉的生物力学,部分原因是控制纤维的神经系统。这些神经系统每个都包含许多单个神经元,这些神经元的输出在多个肌肉的脊髓运动神经元库中有差异。由于这些因素会导致运动的运动,因此动力学家移动任何给定的数字的收缩伴随着其他肌肉的收缩,以稳定其他数字和手腕。主要运动皮层(M1)主导着对人类自愿运动的控制,与其他支付的系统一起起作用,以雕刻激动剂,拮抗剂和稳定肌肉的协调作用。在任何手机运动中,神经活动都分布在宽的M1领域,该区域与其他纤维运动过程中的区域广泛重叠。因此,皮质病变永远不会损害仅一位数字的功能。M1或皮质脊髓道的病变损害相对选择性或“个性化”的延伸纤维运动,而不是浮雕。单独的机制可能是强度与个性化的基本恢复。
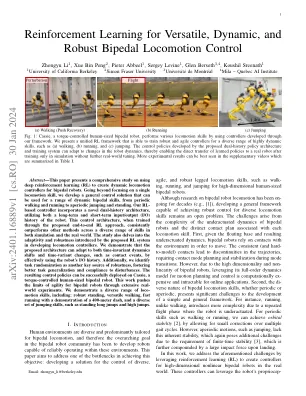
用于多功能,动态和鲁棒的双体运动控制
摘要 - 本文介绍了一项有关使用深钢筋学习(RL)为双皮亚机器人创建动态运动控制器的综合研究。超越了关注单个运动技能的关注,我们开发了一种通用控制解决方案,该解决方案可用于一系列动态的两足动物技能,从定期步行和跑步到Aperiodic的跳跃和站立。我们的基于RL的控制器结合了一种新颖的双历史结构,利用了机器人的长期和短期输入/输出(I/O)历史记录。通过拟议的端到端RL方法进行培训时,这种控制架构始终优于模拟和现实世界中各种技能的其他方法。该研究还深入研究了拟议的RL系统在开发运动控制器时引入的适应性和鲁棒性。我们证明,提出的体系结构可以通过有效使用机器人的I/O历史记录来适应时间不变的动态变化和时间变化的变化,例如接触事件。此外,我们将任务随机化确定为鲁棒性的另一个关键来源,促进了更好的任务概括和对干扰的依从性。可以成功部署所得控制的控制策略,这是一种扭矩控制的人尺寸的两头机器人。这项工作通过广泛的现实世界实验推动了双皮亚机器人的敏捷性限制。我们展示了各种各样的运动技能,包括:坚固的站立,多功能步行,快速跑步,展示了400米仪表板,以及各种各样的跳跃技能,例如站立的跳远和跳高。