机构名称:
¥ 1.0
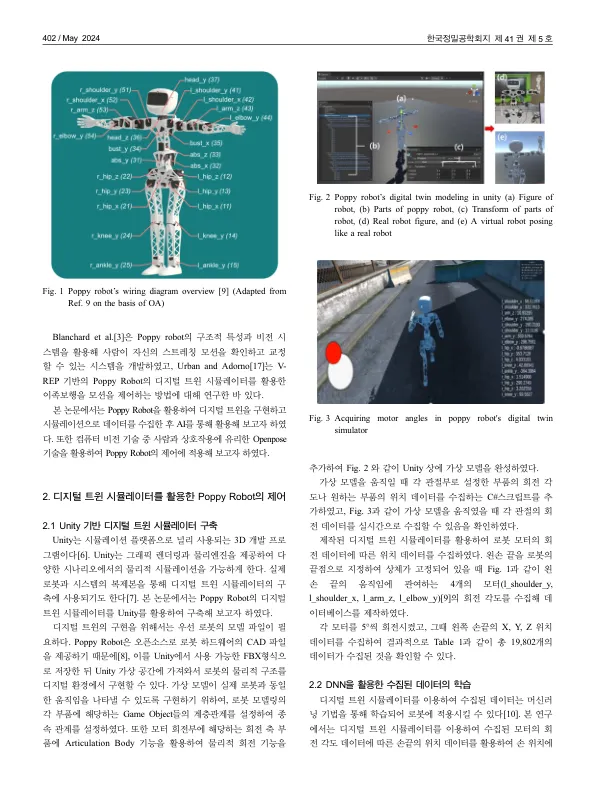
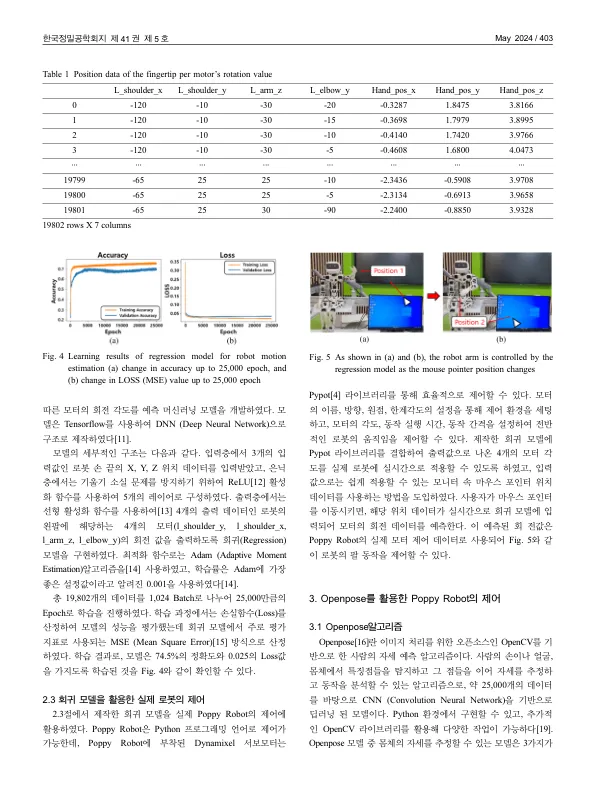
智能制造的关键组成部分是第四次工业革命时代的中心概念,由数字双技术,AI和计算机视觉技术组成。在这项研究中,这些技术被用来管理罂粟机器人,这是一种用于教育和研究目的的人形机器人。数字双胞胎创建了一个虚拟环境,能够对机器人动作进行实时模拟,分析和控制。机器人的数字双胞胎是使用3D开发程序Unity构建的。运动数据是在模拟虚拟机器人的物理结构和运动时捕获的。然后将这些数据馈送到基于张量的深神经网络中,以生成一个回归模型,该模型根据机器人手的位置预测运动旋转。通过将此模型与基于Python的机器人控制程序集成,可以有效地管理机器人的运动。此外,使用OpenPose(一种计算机视觉算法)控制了机器人,该算法预测了人体上的特征点。从2D图像中收集了人类关节点的位置数据,并根据此数据计算运动角度。通过在实际机器人上实施这种方法,可以使机器人复制人类运动。
基于数字双胞胎的机器用于罂粟机器人的运动控制...
主要关键词


相关文件推荐