XiaoMi-AI文件搜索系统
World File Search System逻辑

模糊逻辑在人工智能中的位置
到目前为止,“模糊逻辑”一词通常指一种特定的控制工程方法,该方法利用常识控制规则的数值表示,以便通过插值合成控制律。这种方法与神经网络有许多共同特征。它现在主要关注数值函数的有效编码和近似,目前与知识表示问题的关系越来越少。然而,这是对模糊逻辑的非常狭隘的看法,与人工智能关系不大。扫描模糊集文献,人们意识到模糊逻辑也可能指另外两个与 M 相关的主题:多值逻辑和近似推理。虽然多值逻辑流非常以数学为导向,但 Zadeh 设想的近似推理概念与人工智能研究的主流程序更相关:他在 1979 年写道:“近似推理理论涉及从一组不精确的前提中推导出可能不精确的结论”。在下文中,我们将使用术语“模糊逻辑”来指代任何一种旨在用于推理机制的基于模糊集的方法。

人工智能中的模糊逻辑 - ijrpr
Error 500 (Server Error)!!1500.That’s an error.There was an error. Please try again later.That’s all we know.

控制系统、模糊逻辑和电传操纵系统...
15.补充说明 这项工作是在任务 AM-A-00-HRR-519 下进行的。16.摘要:在 FAA 民用航空医学研究所的可重构通用航空模拟器(配置为 Piper Malibu)中评估了一种模糊逻辑“性能控制”系统,该系统提供包络保护和对空速、垂直速度和转弯速率的直接控制。在一项飞行任务中评估了 24 个人(高飞行时间飞行员、低飞行时间飞行员、学生飞行员和非飞行员各 6 人)的表现,该任务要求参与者跟踪从起飞到着陆的 3-D 航线,由图形路径主飞行显示器表示。还使用传统控制系统收集了每个受试者的基线表现。所有参与者都操作每个系统,对其功能进行了最少的解释,并且没有接受过任何培训。结果表明,模糊逻辑性能控制减少了变量误差和超调,新手学习所需的时间更少(从达到稳定性能所需的时间可以看出),使用起来所需的努力更少(减少了控制输入活动),并且受到所有群体的青睐。

理解和解读标准逻辑数据表
简介 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 顶层查看 TI Logic 数据表 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 建议工作条件 9 . . . . . . . . . . . . . . . . . . . . . . . 电气特性 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 实时插入规范 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 时间要求 12 . . . . . . . . . . . . . . . . . . . . . ..................................................................................................................................................................... 开关特性12................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 噪声特性13....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... .................................................................................................................................................................................................................................................... 操作特性 14 ........................................................................................................................................................................................................................................................................................................ ........................................................................................................................................................................................................................................ ........................................................................................................................................................................................................................ .................................................................................................................................................................................................................. 参数测量信息 14 ........................................................................................................................................................................................................................................................................................................ ........................................................................................................................................................................................ 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。
数字逻辑测试和可测试性 - DTIC
电子硬件容易出现制造时引入的缺陷和现场发生的故障。由于数字逻辑电路的复杂性,它们很难测试。本报告概述了数字逻辑测试。它提供了对文献的访问,并统一了该领域发展起来的术语和概念。它讨论了数字逻辑故障的类型和原因。本报告介绍了逻辑和
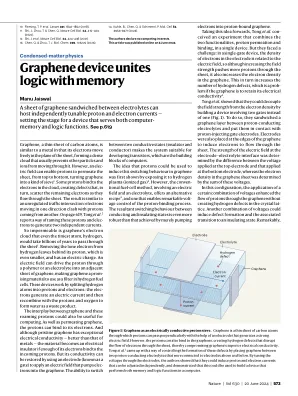
石墨烯设备将逻辑与内存
石墨烯是一块薄薄的碳原子,类似于金属,因为它的电子在纸板的平面上自由移动,形成密集的云,通常阻止其他颗粒和离子穿过它。但是,电子场可以使质子从上到下渗透薄片,从而将石墨烯变成一种筛子1。某些质子与云中的电子结合,形成缺陷,而缺陷又在剩下的电子流过纸张时散射其剩余的电子。结果类似于不受监管的交通交集:电子在一个方向上移动的电子与质子来自另一个。第619页,Tong等人。2报告一种驯服这些质子和电子产生两个独立电流的方法。非常不可渗透是石墨烯的电子云,即使是最小的原子,氢也可能需要数十亿年的时间才能通过纸。从氢叶中去除孤独的质子,其质子甚至更小,并且具有电荷。电场可以将质子通过聚合物或电解质驱动到相邻的石墨烯薄片中,从而使石墨烯成为易于用作氢燃料电池过滤器的杂物材料。这些设备通过将氢原子拆分为质子和电子来起作用:元素会产生电流,然后与质子和氧气重组以形成水作为废物。石墨烯和这些漫游质子之间的相互作用也可用于计算。以及渗透石墨烯,质子可以与其电子结合。切换的能力,尽管原始石墨烯具有出色的电导率(比金属的电导率更好,但如果其电子中的足够多的电子结合到传入的质子,材料就会变成电绝缘体。,但是可以通过使用电极(称为栅极)施加将电场泵入石墨烯的电场来恢复其电导率。
使用模糊逻辑和HIL模拟器
1通讯作者:dsbsrm@gmail.com收到:2023年5月9日修订:2023年6月28日接受:2023年7月13日出版:2023年7月21日摘要 - 铅酸电池的性能和健康,用于自动,工业和可再生能源系统等各种应用中的铅酸电池的性能和可再生能源系统的运营效益和实量效益和实地效益。实时监控电池健康的性能可防止故障并延长电池寿命。本文建议使用模糊逻辑控制器和硬件(HIL)模拟器进行铅酸电池实时监控系统的健康和性能。所提出的系统测量关键电池参数,例如电压,电流和温度。它使用模糊的逻辑算法处理这些数据,以计算电池的充电状态(SOC)和健康状况(SOH)。HIL模拟器提供了一个虚拟平台,用于实时测试和验证系统。调查结果表明,提出的方法可以产生可靠的电池SOH估计值,这使其成为各种应用中实时电池监视的有前途的解决方案。关键字 - 模糊逻辑控制器,HIL实时模拟,铅酸电池,充电状态,健康状况。
b.com逻辑管理的研究材料...
大数据大数据挑战包括存储和分析大量信息以及开发实时分析能力和专业知识。数据集成和验证(数据治理)对公司来说是一个严重的问题。在物流世界中,这些挑战可以在车辆诊断,驾驶模式,位置信息,交通信息,传感器,预测系统,操作系统等。但目标仍然相同 - 迅速有效地收集和分析结构化和非结构化数据(例如社交媒体帖子,网页,多媒体内容)。最近的研究表明,大数据是创新和生产力的新领域,具有透明的信息,并且可以在更高层次上使用。公司将越来越需要访问和整合来自多个数据源的大量信息。

II糖尿病:使用模糊逻辑和...
糖尿病等疾病是慢性的,需要长期管理。 胰岛素的产生不足会导致高血糖水平。 这些疾病导致严重的健康问题,例如心脏病,血管投诉,眼睛疾病,肾功能障碍和神经疾病。 因此,对危险因素的准确评估和管理对于糖尿病的发作至关重要。 我们提出的方法结合了模糊逻辑和机器学习算法的糖尿病风险预测。 三种机器学习模型经过培训,将患者分为两类糖尿病(I型和II型),这些糖尿病基于他们从卡蒂哈尔医学院和医院和苏瓦丹实验室收集的临床数据集。 多项式回归算法的得分为0.947,而RBF内核的支持矢量回归算法的得分为0.954,线性内核的得分为0.73。 我们建议的糖尿病等疾病是慢性的,需要长期管理。胰岛素的产生不足会导致高血糖水平。 这些疾病导致严重的健康问题,例如心脏病,血管投诉,眼睛疾病,肾功能障碍和神经疾病。 因此,对危险因素的准确评估和管理对于糖尿病的发作至关重要。 我们提出的方法结合了模糊逻辑和机器学习算法的糖尿病风险预测。 三种机器学习模型经过培训,将患者分为两类糖尿病(I型和II型),这些糖尿病基于他们从卡蒂哈尔医学院和医院和苏瓦丹实验室收集的临床数据集。 多项式回归算法的得分为0.947,而RBF内核的支持矢量回归算法的得分为0.954,线性内核的得分为0.73。 我们建议的胰岛素的产生不足会导致高血糖水平。这些疾病导致严重的健康问题,例如心脏病,血管投诉,眼睛疾病,肾功能障碍和神经疾病。因此,对危险因素的准确评估和管理对于糖尿病的发作至关重要。我们提出的方法结合了模糊逻辑和机器学习算法的糖尿病风险预测。三种机器学习模型经过培训,将患者分为两类糖尿病(I型和II型),这些糖尿病基于他们从卡蒂哈尔医学院和医院和苏瓦丹实验室收集的临床数据集。多项式回归算法的得分为0.947,而RBF内核的支持矢量回归算法的得分为0.954,线性内核的得分为0.73。我们建议的

组合逻辑上的单粒子瞬变
辐射引起的效应对现代 CMOS 技术的可靠性构成威胁。晶体管尺寸的缩小、电源电压的降低和工作频率的提高,已导致单粒子瞬变 (SET) 成为纳米 CMOS 晶体管的主要可靠性问题 [1–3]。质子、中子或重离子等高能粒子可以撞击芯片并产生电流放电。在组合逻辑中观察到的这种电流脉冲称为 SET。当此脉冲到达存储元件并改变其值时,会导致称为单粒子翻转 (SEU) 的错误。瞬变和存储翻转这两种效应在文献中被称为软错误 (SE),因为它们不是破坏性效应。文献中介绍了几种用于评估数字电路对 SET 和 SEU 的鲁棒性的技术。基于模拟的方法允许在复杂电路的设计流程中进行早期评估,并采用缓解策略来实现应用约束。例如,可以进行 TCAD(技术计算机辅助设计)模拟,以模拟粒子与组成电子设备的材料之间的相互作用。尽管这种方法可以达到最高的精度,但它不是一种可扩展的方法,通常用于研究基本结构(如 pn 结或单个晶体管)中的基本机制。另一种计算成本较低的方法是 TCAD 混合模式方法,其中仅将打击晶体管建模为 TCAD 设备,而其余设备则使用 SPICE 建模进行模拟。在这种情况下,可以研究多个晶体管,从而模拟逻辑门和小电路块。为了提高可扩展性,SPICE 中基于电流的模型可以模拟