XiaoMi-AI文件搜索系统
World File Search System遮挡
下载俄罗斯联邦国民警卫队私人保安部队使用的机动车辆通知传输系统、设施技术安全设备以及安全警报和防盗装置的统一要求
安全电视系统的要求 对冗余辅助电源的要求 功能要求 内置灯光指示的要求 对通过数字数据传输通道传输的通知生成的要求 设计要求 具有冗余的辅助电源类别的定义功能条款 设施无线安全报警系统要求 设备要求入侵检测 入侵检测装置的一般要求 用于保护场所和开放区域的光电红外无源探测器的要求 对光电红外有源探测器的要求 用于遮挡场所玻璃结构的声音探测器的要求 用于遮挡的冲击接触探测器的要求玻璃结构阻塞建筑结构和保险箱的振动探测器的要求磁接触探测器的要求 用于保护场所和存储设施的超声波探测器的要求 用于保护物体周边的线性无线电波探测器的要求 用于保护场所和开放区域的体积无线电波探测器的要求 用于保护场所和物体周边的电容式探测器的要求安防单项惯性探测器的要求 组合式(红外无源探测器)的要求用于保护场所的组合(红外无源与超声波)探测器的要求 用于保护场所的组合探测器的要求 组合探测器的要求 用于复杂阻挡物体围栏周边的组合探测器的要求

对复杂犯罪现场对象的自适应深度学习...
犯罪现场调查通常发生在复杂的环境中,在复杂的环境中,可能会隐藏,遮挡或分散在混乱的背景中。传统的对象检测方法经常面临此类挑战,导致错过或不准确地识别关键的法医元素。本研究提出了一个自适应深度学习框架,旨在在复杂的犯罪现场中精确的对象检测。通过利用高级卷积神经网络(CNN),基于区域的CNN(R-CNN)和注意机制,提出的模型动态适应了不同的犯罪现场条件,无论大小,方向或遮挡,都可以有效地识别对象。框架集成了多尺度特征提取,上下文感知学习和自适应学习率,以提高准确性和鲁棒性。将Yolov8和掩码R-CNN合并用于实时检测和实例分段,该系统可确保对象定位和分类的高精度。对各种犯罪现场数据集进行了广泛的测试,证明了该模型的出色表现,平均平均精度(MAP)为92.5%,同时显着降低了误报和负面因素。这种适应性方法不仅简化了法医研究,而且还可以最大程度地减少人为错误,为执法机构提供了可靠,有效的工具。未来的研究将着重于将系统的功能扩展到3D犯罪现场重建和跨域法医分析。
多旋翼无人机着陆于运动车辆的误差状态估计与控制
目前最先进的无人机着陆系统依赖于对着陆目标车辆上放置的视觉路标的检测。然而,在光线不足、遮挡或极端运动等具有挑战性的条件下,这些路标可能在相当长的时间内都检测不到。本论文展示了一种状态估计算法,该算法跟踪和估计目标车辆上未知视觉特征的位置。实验结果表明,该方法在未检测到路标的情况下显著提高了对目标车辆状态的估计。

使用k-neartift加权融合的人重新识别*
摘要:亲自识别,重新排列是通过完善检索结果的初始排名来提高整体准确性的关键步骤。先前的研究主要集中在单视图像的特征上,这些特征可能会导致偏见和诸如姿势变化,观点变化和遮挡等问题。使用多视图来介绍一个人可以帮助减少视图偏差。在这项工作中,我们提出了一种有效的重新级别方法,该方法通过使用K-Neartivt加权融合(KWF)方法来汇总邻居的功能来生成多视图特征。具体来说,我们假设从重新识别模型中提取的特征在表示相同的身份时高度相似。因此,我们以无监督的方式选择K相邻功能来生成多视图功能。此外,本研究探讨了特征聚合过程中的重量选择策略,从而使我们能够确定有效的策略。我们的重新排列方法不需要模型进行微调或额外的注释,因此它适用于大规模数据集。我们在重新识别数据集Market1501,MSMT17和遮挡的dukemtmc上评估我们的方法。结果表明,从初始排名结果中重新列出顶级M候选者时,我们的方法会显着提高列表@1并映射。具体而言,与初始结果相比,我们的重新排列方法在具有挑战性的数据集中,等级@1的提高分别为9.8% / 22.0%:MSMT17和闭塞性dukemtmc。此外,我们的方法证明了与其他重新排列方法相比,计算效率的实质性提高。

太阳辐射修改(SRM)Forsafe-2模型中有什么新功能?
图4。主要的碳(C),氮(N)和磷(P)过程中包括新的Forsafe中。① photosynthesis, ② deposition (fertilization), ③ plant nutrient uptake, ④ C and nutrient allocation, ⑤ retranslocation, ⑥ litter fall, ⑦ microbial assimilation, ⑧ microbial decay and overflow metabolism, ⑨ microbial respiration, ⑩ immobilization, ⑪ biological mineralization and overflow metabolism mineralization, ⑪生化矿化,⑫humification,⑬p风化,⑭p吸附/解吸,⑮p遮挡,⑯营养浸出(渗透和表面流动)。EDC表示易于分解的碳。
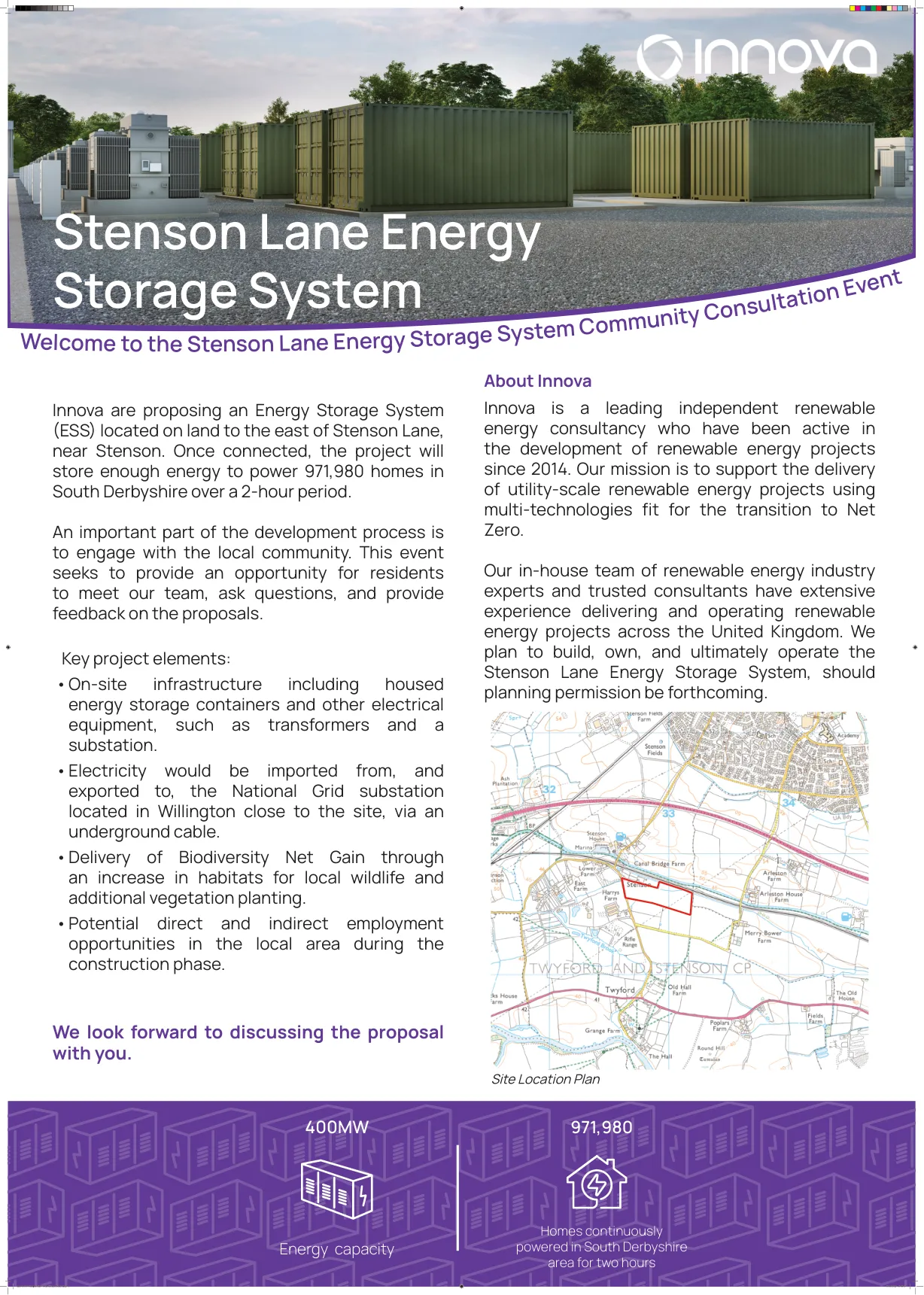
Stenson Lane 能源存储系统 - Innova
特伦特和默西运河保护区位于北部约 50 米处,特怀福德保护区位于西南约 540 米处。评估结论是,运河保护区不会因拟议的开发地点而产生重要影响。特怀福德保护区也将免受任何影响;由于距离较远以及树篱和树木的间隙遮挡,无法与该地点互视。在这两种情况下,拟议的开发地点都不会对保护区产生重要影响。

利用人工智能实现多任务的机器人
2. 文献综述 1. 根据陈志豪等人[1]的论述,它为智能移动应用(例如道路交通和铁路气候)实现了对象识别、定位和监控框架。首先在两种深度学习方法中进行对象检测和跟踪方法:You Only Look Once (YOLO) V3 和单次检测器 (SSD)。 2. Zhong-Qiu Zhao 等人[2]的论述,本文介绍了一种专注于对象检测框架的深度学习分析。在卷积神经网络(CNN)的背景下解决了通用对象检测架构,并进行了一些修改和有用的技巧以提高检测效率。 3. Licheng Jiao 等人[3]的论述,本文重点介绍了用于检测任务的深度学习网络的快速发展,以及对象检测器的效率得到了大大提高。 4. Yakup Demir2 等人[4]的论述,涉及在真实驾驶环境中对周围物体进行可靠和准确的检测和识别的自动驾驶。虽然已经提出了许多用于物体检测的算法,但并非所有算法都足够稳健,可以检测和识别被遮挡或截断的物体。本文提出了一种基于卷积神经网络 (CNN) 和支持向量机 (SVM) 的混合局部多系统 (LM-CNNSVM),因为它具有强大的提取能力和稳健的分类特性。5. Mukesh Tiwari 编辑 [5] 讨论了由于物体运动的日常变化和场景大小的变化、遮挡、外观变化以及自我运动和照明的变化,物体的识别和跟踪是重要的研究领域。具体而言,特征选择是跟踪物体的重要组成部分。

在收获和农业中使用激光雷达地形的诱惑和陷阱
在采伐和道路设计中使用激光雷达地形的诱惑和陷阱 Finn Krogstad 和 Peter Schiess 的论文发表于 2004 年 6 月 13 日至 16 日在加拿大不列颠哥伦比亚省温哥华举行的 IUFRO 3.06 山地条件下的森林作业联合会议和第 12 届国际山地伐木会议。摘要 机载激光测高 (Lidar) 可以生成细节丰富、精度极高的地形图,即使在被森林冠层遮挡的地面上也是如此。详细的激光雷达地形可以识别可能的着陆位置、难以穿越的溪流、不稳定的土壤、难以穿越的边坡和有用的长凳。这些细节可以减少现场时间,指导道路设计走向更好的选择,并提高我们对成本估算的信心。然而,激光雷达测绘偶尔会失败,这些失败的表示方式将决定激光雷达的可靠性和道路设计价值。我们讨论了首次使用激光雷达测绘塔霍马州立森林的经验,该森林位于 Mt. 南部。雷尼尔山。这种详细的地形测绘用于森林作业设计,例如着陆点和道路位置,作为基于流域的收获和运输计划的一部分。基于激光雷达的办公室设计随后进行了现场验证。对于森林工程设计而言,此类 DEM 成功的关键在于能够(或缺乏)区分地面点覆盖充足或边缘的区域,从而导致优秀或错误的测绘细节。我们讨论了各种方法,这些方法可以识别地面点覆盖边缘的区域,从而形成测绘承包商应遵守的第一组激光雷达数据收集要求。观察树冠下的情况木材采伐和道路规划中经常出现的一个问题是,用于采伐的树木会遮挡必须堆放原木和修建道路的地面。规划中常用的地形图基于航拍照片,其中我们现在想要采伐的林分遮挡了我们必须规划的地面。因此,得到的地形图是树冠顶部的地图,带有假定树高的偏移。不幸的是,树冠并不完全贴合地面,在采伐和道路规划中可能至关重要的细微地形变化并未反映在最终的树冠顶部。地形通常包括土壤不稳定、岩石露头和不平坦的地形区域,这些区域可能会给采伐和道路建设带来困难。激光雷达的工作原理是拍摄数百万张树冠还会遮挡可作为方便着陆点和道路位置的天然土丘和长凳。因此,这些地形图只能作为设计的一般指南,操作的关键要素需要基于现场验证。机载激光地形扫描 (Lidar) 的最新发展使得即使在森林冠层下也可以进行详细的地形测绘。
在收获和收获中使用激光雷达地形的吸引力和陷阱......
在采伐和道路设计中使用激光雷达地形的诱惑和陷阱 Finn Krogstad 和 Peter Schiess 的论文发表于 2004 年 6 月 13 日至 16 日在加拿大不列颠哥伦比亚省温哥华举行的 IUFRO 3.06 山地条件下的森林作业联合会议和第 12 届国际山地伐木会议。摘要 机载激光测高 (Lidar) 可以生成细节丰富、精度极高的地形图,即使在被森林冠层遮挡的地面上也是如此。详细的激光雷达地形可以识别可能的着陆位置、难以穿越的溪流、不稳定的土壤、难以穿越的边坡和有用的长凳。这些细节可以减少现场时间,指导道路设计走向更好的选择,并提高我们对成本估算的信心。然而,激光雷达测绘偶尔会失败,这些失败的表示方式将决定激光雷达的可靠性和道路设计价值。我们讨论了首次使用激光雷达测绘塔霍马州立森林的经验,该森林位于 Mt. 南部。雷尼尔山。这种详细的地形测绘用于森林作业设计,例如着陆点和道路位置,作为基于流域的收获和运输计划的一部分。基于激光雷达的办公室设计随后进行了现场验证。对于森林工程设计而言,此类 DEM 成功的关键在于能够(或缺乏)区分地面点覆盖充足或边缘的区域,从而导致出色或错误的测绘细节。我们讨论了各种方法,这些方法可以识别地面点覆盖边缘的区域,从而形成测绘承包商应遵守的第一组激光雷达数据收集要求。观察树冠下的情况木材采伐和道路规划中经常出现的一个问题是,用于采伐的树木可能会遮挡必须堆放原木和修建道路的地面。规划中常用的地形图基于航拍照片,其中我们现在想要采伐的林分遮挡了我们必须规划的地面。因此,得到的地形图是树冠顶部的地图,带有假定树高的偏移。不幸的是,树冠并不完全贴合地面,在采伐和道路规划中可能至关重要的细微地形变化并未反映在最终的树冠顶部。地形通常包括土壤不稳定、岩石露头和不平坦的地形区域,这些区域可能会给采伐和道路建设带来困难。激光雷达的工作原理是拍摄数百万张树冠还会遮挡可作为方便着陆点和道路位置的天然土丘和长凳。因此,这些地形图只能作为设计的一般指南,操作的关键要素需要基于现场验证。机载激光地形扫描 (Lidar) 的最新发展使得即使在森林冠层下也可以进行详细的地形测绘。