机构名称:
¥ 1.0
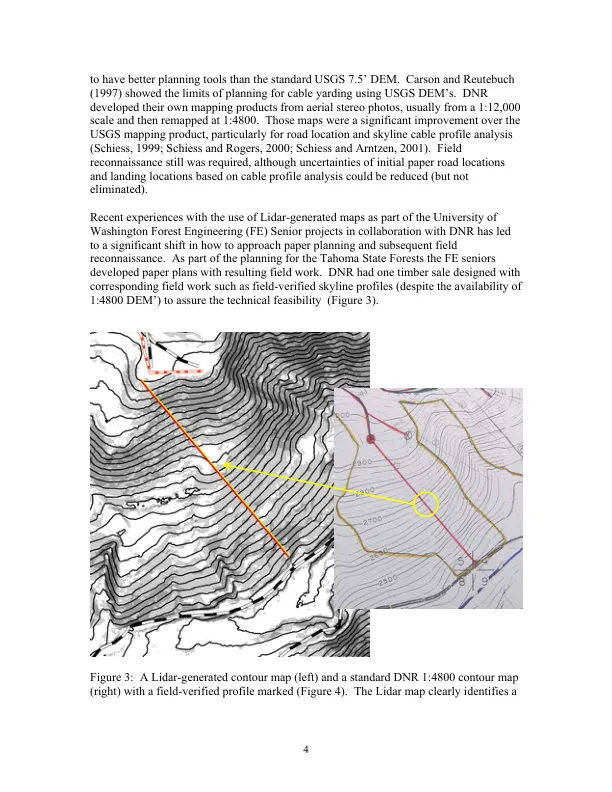
在采伐和道路设计中使用激光雷达地形的诱惑和陷阱 Finn Krogstad 和 Peter Schiess 的论文发表于 2004 年 6 月 13 日至 16 日在加拿大不列颠哥伦比亚省温哥华举行的 IUFRO 3.06 山地条件下的森林作业联合会议和第 12 届国际山地伐木会议。摘要 机载激光测高 (Lidar) 可以生成细节丰富、精度极高的地形图,即使在被森林冠层遮挡的地面上也是如此。详细的激光雷达地形可以识别可能的着陆位置、难以穿越的溪流、不稳定的土壤、难以穿越的边坡和有用的长凳。这些细节可以减少现场时间,指导道路设计走向更好的选择,并提高我们对成本估算的信心。然而,激光雷达测绘偶尔会失败,这些失败的表示方式将决定激光雷达的可靠性和道路设计价值。我们讨论了首次使用激光雷达测绘塔霍马州立森林的经验,该森林位于 Mt. 南部。雷尼尔山。这种详细的地形测绘用于森林作业设计,例如着陆点和道路位置,作为基于流域的收获和运输计划的一部分。基于激光雷达的办公室设计随后进行了现场验证。对于森林工程设计而言,此类 DEM 成功的关键在于能够(或缺乏)区分地面点覆盖充足或边缘的区域,从而导致优秀或错误的测绘细节。我们讨论了各种方法,这些方法可以识别地面点覆盖边缘的区域,从而形成测绘承包商应遵守的第一组激光雷达数据收集要求。观察树冠下的情况木材采伐和道路规划中经常出现的一个问题是,用于采伐的树木会遮挡必须堆放原木和修建道路的地面。规划中常用的地形图基于航拍照片,其中我们现在想要采伐的林分遮挡了我们必须规划的地面。因此,得到的地形图是树冠顶部的地图,带有假定树高的偏移。不幸的是,树冠并不完全贴合地面,在采伐和道路规划中可能至关重要的细微地形变化并未反映在最终的树冠顶部。地形通常包括土壤不稳定、岩石露头和不平坦的地形区域,这些区域可能会给采伐和道路建设带来困难。激光雷达的工作原理是拍摄数百万张树冠还会遮挡可作为方便着陆点和道路位置的天然土丘和长凳。因此,这些地形图只能作为设计的一般指南,操作的关键要素需要基于现场验证。机载激光地形扫描 (Lidar) 的最新发展使得即使在森林冠层下也可以进行详细的地形测绘。
在收获和农业中使用激光雷达地形的诱惑和陷阱
主要关键词



相关文件推荐