XiaoMi-AI文件搜索系统
World File Search System驱动系统

舌头驱动系统操作电脑
“舌头驱动器”是一种无线、非接触式舌头操作辅助技术,专为严重残疾的人开发,用于使用计算机,并仅使用舌头控制轮椅和其他设备等环境。舌头被认为是严重残疾人操作辅助设备的绝佳附属物。舌头驱动器由固定在舌头上的霍尔效应磁传感器阵列组成。传感器通过无线链路传输信号,并对其进行处理以控制安装在牙齿外侧的牙齿保持器上,以测量由米粒大小的小型永久微型磁铁产生的磁场,该磁铁通过植入、穿孔或粘合剂附着在个人的舌头上。这项技术允许残疾人在移动计算机鼠标或电动轮椅时使用舌头。该技术的主要优势是可以通过处理传感器输出的组合来捕捉各种各样的舌头运动。这将为用户提供平滑的比例控制,而不是基于大多数现有技术的开/关控制。

使用 TMS320F240 开发 SRM 驱动系统
从结构上讲,SRM 是所有电机中最简单的。只有定子有绕组。转子不包含导体或永磁体。它只是由堆叠在轴上的钢片组成。正是由于这种简单的机械结构,SRM 具有低成本的前景,这反过来又在过去十年中激发了大量对 SRM 的研究。然而,该设备的机械简单性也有一些局限性。与无刷直流电机一样,SRM 不能直接从直流母线或交流线路运行,而必须始终进行电子换向。此外,机器产生磁阻转矩所必需的定子和转子的凸极会导致强烈的非线性磁特性,使 SRM 的分析和控制变得复杂。毫不奇怪,业界对 SRM 的接受度一直很低。这是由于 SRM 存在一些已知困难、缺乏用于操作 SRM 的商用电子设备以及传统交流和直流机器在市场上的根深蒂固。然而,SRM 确实提供了一些优势,并且可能具有低成本。例如,它们可以是非常可靠的机器,因为 SRM 的每个相在物理、磁性和电气上都与其他电机相基本独立。此外,由于转子上没有导体或磁铁,因此与同类电机相比,可以实现非常高的速度。
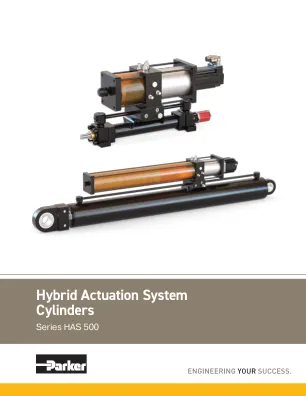
混合驱动系统气缸 - HAS 500 系列
A09A = MTR、PMAC、MPP0921C(240VAC)0.8 HP,IP65 A09B = MTR、PMAC、MPP0921R(460VAC)0.8 HP,IP65 A09C = MTR、PMAC、MPP0922D(240VAC)1.65 HP,IP65 A09D = MTR、PMAC、MPP0922R(460VAC)1.65 HP,IP65 A09E = MTR、PMAC、MPP0923D(240VAC)2 HP,IP65 A09F = MTR、PMAC、MPP0923R(460VAC)2 HP,IP65 A10A = MTR、PMAC、MPP1002D(240VAC)2 HP,IP65 A10B = MTR、PMAC、 MPP1002R (460VAC) 2.49 HP,IP65 A10C = MTR、PMAC、MPP1003C (240VAC) 2.4 HP,IP65 A10D = MTR、PMAC、MPP1003R (460VAC) 2.5HP,IP65 A11A = MTR、PMAC、MPP1152D (240VAC) 2.2 HP,IP65 A11B = MTR、PMAC、MPP1152R (460VAC) 2 HP,IP65 A11C = MTR、PMAC、MPP1153C (240VAC) 3 HP,IP65 A11D = MTR、PMAC、MPP1153R (460VAC) 3 HP,IP65 A11E = MTR、PMAC、MPP1154B (240VAC) 3.6 HP, IP65 A11F = MTR、PMAC、MPP1154P (460VAC) 3.6 HP,IP65 A14B = MTR、PMAC、MPP1422R (460VAC) 4.5 HP,IP65 A14D = MTR、PMAC、MPP1424R (460VAC) 7 HP,IP65 A14F = MTR、PMAC、MPP1426P (460VAC) 8.4 HP,IP65 A14G = MTR、PMAC、MPP1428Q (460VAC) 9.4 HP,IP65 D09A = MTR、PMAC-无刷,24V,2 HP,IP56 D09B = MTR、PMAC-无刷,36V,2 HP,IP56 D09C = MTR、PMAC-无刷,48V,2 HP, IP56 D12A = MTR,PMAC-无刷,24V,2.5 HP,IP56 D12B = MTR,PMAC-无刷,36V,2.5 HP,IP56 D12C = MTR,PMAC-无刷,48V,2.5 HP,IP56 F17A = MTR,PMDC-有刷,12-48V,4 HP 连续,打开 X00X = 其他
电力电子和驱动系统在现代中的作用...
R.C.N. Pilawa-Podgurski、D.J. Perreault “子模块集成分布式最大功率点跟踪用于太阳能光伏应用”,IEEE 电力电子学报,第 28 卷,第 6 期,2013 年 6 月

国际电力电子与驱动系统杂志(IJPEDS)
世界各地都在使用可再生能源发电,以满足日益增长的负荷需求。可再生能源无污染,资源丰富。随着研究的不断进步,发电成本已经降低。由于天气原因,光伏 (PV) 无法全天发电。为了保持发电的连续性,本研究工作考虑了混合可再生能源发电系统 (HRGS) 的概念。HRGS 是多种可再生能源的集成,包括光伏、风能、固体氧化物燃料电池 (SOFC)、辅助装置 (AU)。AU 用作备用发电,当所有可再生能源都无法发电时,它可以发电。AU 可能是柴油发电机 (DG) 或超级电容器。本文讨论了 HRGS 的各个部分及其比较。此外,它对能源管理的影响,以便以连续可靠的方式向电网输送能源。因此,重点介绍了 HRGS 和可再生能源的不同组成部分的详细研究,这将有助于新研究人员推进发电及其与电网相连的能源管理控制策略。
具有自适应PID控制的电动车辆驱动系统
对于我们正在处理的系统,经典的PID不足,因为它不是线性系统。PID控制器的启动需要在参数调整中并不总是简单的工作,除了某些方法的存在[10]。尽管有这些方案的帮助,但有必要进行观察期调查控制器的性能,在某些情况下,这需要大量时间。在控制器启动服务中,这可以解释为缺点或困难。在更复杂的情况下,动态现象损害了PID控制器的性能,因此需要重新调整控制器参数。我们接下来要做的是根据参考和实际速度将我们的非线性系统划分为多个线性子系统。就像我们以前所做的那样,我们现在将获得每个不同条件的关键增益和持续振荡时期。

使用 Cas12a 核酸酶的下一代 CRISPR 基因驱动系统
图 1. 基于 Cas12a 的基因驱动显示出受温度调节的超孟德尔遗传率。(a)CopyCat 基因驱动系统示意图。DsRed 标记的 Cas12a 是一种静态转基因,它通过等位基因转换提供复制 GFP 标记的 CopyCat 元素的核酸酶,而等位基因转换由周围的同源臂驱动。(b)表达 Cas12a 的雄性与携带黑檀木 CopyCat 构建体(e1 或 e4 基因驱动)的处女雌性杂交方案。收集的处女雌性(Cas12a-dsRed + 基因驱动-GFP)与黑檀木突变雄性杂交,通过筛选 F2 后代中的 GFP 标记来评估种系传递率。深灰色半箭头表示雄性 Y 染色体。F1 雌性中的绿色三角形表示潜在的基因驱动复制到野生型染色体上。 (c) 通过对 GFP 标记的乌木 CopyCat 构建体的 F2 后代进行表型评分,评估 F1 雌性生殖系中的基因驱动活性。遗传率测量值与平均遗传率 (%)(也以黑条表示)和进行的 F1 杂交次数 (n) 一起报告在图表顶部。

数据驱动系统中可解释的AI的隐私影响
抽象的机器学习(ML)模型,明显强大,缺乏解释性。缺乏透明度,通常被称为ML模型的黑匣子性质,破坏了信任,并敦促需要提高其解释性的努力。可解释的AI(XAI)技术通过提供框架和方法来解释这些复杂模型的内部决策过程,以应对这一挑战。诸如反事实解释(CF)和特征重要性之类的技术在实现这一目标中起着至关重要的作用。此外,高质量和多样化的数据仍然是强大和可信赖的ML应用程序的基础元素。在许多应用中,用于训练ML和XAI解释器的数据包含敏感信息。在这种情况下,可以使用许多隐私技术来保护数据中的敏感信息,例如差异隐私。随后,由于其反对目标,XAI与隐私解决方案之间发生了冲突。由于XAI技术为模型行为提供了推理,因此它们揭示了相对于ML模型的信息,例如其决策边界,特征值或深度学习模型的梯度,当解释暴露于第三实体时。攻击者可以使用这些解释来启动隐私违反攻击,以执行模型提取,推理和会员攻击。这个难题强调了在理解ML决策和保护隐私之间找到正确平衡的挑战。
NUREG/CR-5555,“西屋 PWR 控制棒驱动系统老化评估。”
对运行经验数据进行了评估,以确定主要的故障模式、原因和影响。在本研究中,CRD 系统边界包括与手动控制棒运动相关的电源和逻辑柜,以及控制棒机构本身。还考虑了互连电缆和连接器以及棒位置指示系统的老化相关退化。数据评估与建筑材料和运行环境评估相结合,得出的结论是,西屋 CRD 系统容易因老化而退化,如果不加以控制,可能会随着工厂的老化而影响其预期的安全功能和性能。导致反应堆跳闸(对安全系统的挑战)的 CRD 系统故障数量值得持续关注。
