XiaoMi-AI文件搜索系统
World File Search System高斯噪声

一般高斯噪声机制及其对无偏平均值估计的最佳性
我们调查了差异隐私中无偏见的高维平均估计器。我们考虑了差异的私有机制,其预期输出等于输入数据集的均值,对于从r d中的固定有限域K绘制的每个数据集。一种经典的私人平均估计方法是计算真实的均值,并添加无偏见但可能相关的高斯噪声。在本文的第一部分中,我们研究给定域K的高斯噪声机理可实现的最佳误差,当在某些p≥2中测量误差范围时。我们提供算法,以在适当的假设下计算给定k的高斯噪声的最佳协方差,并证明最佳误差的许多不错的几何特性。这些结果将来自域K的分解机制理论推广到对称和有限的(或等效地,对称的多面体)到任意界面的域。在本文的第二部分中,我们表明,高斯噪声机制在所有私人无偏见的平均估计机制中都在非常强烈的意义上达到了几乎最佳的误差。特别是,对于每个输入数据集,满足集中差异隐私的公正平均估计器至少与最佳高斯噪声机制一样多。我们将此结果扩展到局部差异隐私,并近似差异隐私,但是对于后者,对于数据集或相邻数据集,下限的误差较低的界限是必要的,则必须放松。

phys361-S24-Lecter-26-diffusion.pdf
•给定从实际数据分布采样的数据点,我们定义了一个正向扩散过程,在该过程中,我们以步骤向样本中添加少量的高斯噪声,从而产生一系列嘈杂的样本。

使用跳投的生成建模
基于得分的扩散模型使用时间转移的扩散过程从未知目标分布中生成样品。这种模型代表了工业应用中的最新方法,例如人造图像产生,但最近注意到,通过考虑具有重尾部特征的注入噪声,可以进一步提高其性能。在这里,我将生成扩散过程的概括性化为一类广泛的非高斯噪声过程。我考虑由标准高斯噪声驱动的前进过程,并以超级强制的泊松跳跃为代表有限的活动莱维过程。生成过程被证明由依赖跳跃幅度分布的广义分数函数控制。概率流ode和SDE配方都是使用基本技术努力得出的,并且用于从多元拉普拉斯分布中得出的跳跃振幅实现。非常重要的是,对于捕获重尾目标分布的问题,尽管没有任何重尾特性,但跳跃延伸拉普拉斯模型的表现就超过了由α-稳定噪声驱动的模型。该框架可以很容易地应用于其他跳跃统计数据,这些统计数据可以进一步改善标准扩散模型的性能。

视觉增强的动态语义原型,用于生成零拍学习
生成的零拍学习(ZSL)学习了一个生成器来合成看不见类的视觉样本,这是推进ZSL的有效方法。然而,现有的发电方法依赖于高斯噪声和预定义的语义原型的条件,这限制了仅在特定的看到类中优化的发电机,而不是对每个视觉实例进行特征,从而导致概括不良(例如,过度适用于可见的类)。为了解决这个问题,我们提出了一种新颖的视觉启动动态语义原型方法(称为VADS),以增强发电机来学习准确的语义 - 视觉映射,以充分利用视觉效果的知识为语义条件。详细说明,VADS由两个模块组成:(1)视觉吸引域知识学习模块(VDKL)了解视觉特征的偏见和全局先验(称为域的视觉知识),这些偏见取代了纯净的高斯噪声,以提供更丰富的先验噪声信息; (2)以视觉为导向的语义更新模块(VOSU)根据样本的视觉表示更新语义原型。最终,我们将它们的输出作为动态语义原型串联,作为发电机的条件。广泛的实验表明,我们的VAD在三个突出的数据集上实现了上升的CZSL和GZSL prounperces,并且在Sun,Cub和Awa2上分别胜过其他最先进的方法,其平均分别增加了6.4%,5.9%,5.9%和4.2%。
提高MRI图像的清晰度和降噪...
Mandeep Kaur 1,Rahul Thour博士2 1研究学者部计算机科学与应用,Desh Bhagat University,Mandi Gobindgarh 2助理教授计算机科学和应用,德什·巴加特大学,曼迪·戈宾德加(Mandi Gobindgarh)摘要:脑部疾病是严重的疾病,不得不忽略,因为大脑失败会对整体健康构成重大威胁。早期检测和干预对于管理各种与大脑相关的疾病至关重要。检测脑肿瘤和其他神经系统问题的主要诊断方法之一是MRI成像。MRI是一种首选技术,由于其效率,实时成像功能和缺乏辐射。然而,诸如Speckle噪声,高斯噪声和其他工件之类的挑战继续损害MRI图像的质量。因此,提高图像质量对于准确的脑部疾病诊断至关重要。为了克服这些挑战,采用了各种成像技术来进行预处理,降低降噪和图像增强。从嘈杂的MRI数据中获得高质量图像的关键方法是图像恢复和增强。鉴于MRI的高频特性,脑部扫描中通常存在噪声。预处理通过应用过滤器消除噪声来改善图像质量中起着至关重要的作用。诸如Mean,Mentian,Wiener和其他过滤器之类的技术通常用于解决诸如Speckle,Salt和Pepper和Gaussian噪声之类的问题。关键字:大脑MRI成像,斑点噪声,高斯噪声,预处理,图像增强。这项研究提供了各种MRI图像预处理和增强技术的全面概述,概述了它们的目标和有效性。
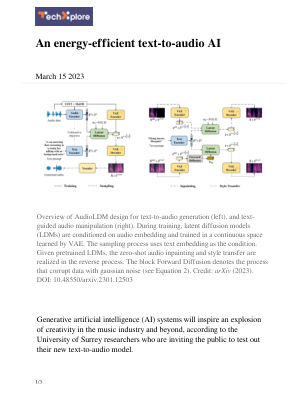
节能的文本转音频 AI
AudioLDM 设计概览,用于文本到音频生成(左)和文本引导的音频处理(右)。在训练期间,潜在扩散模型 (LDM) 以音频嵌入为条件,并在 VAE 学习的连续空间中进行训练。采样过程使用文本嵌入作为条件。给定预训练的 LDM,零样本音频修复和风格迁移以反向过程实现。前向扩散块表示用高斯噪声破坏数据的过程(参见公式 2)。来源:arXiv (2023)。DOI:10.48550/arxiv.2301.12503
![第一个用于设计深网和DLSTUDIO的火炬介绍[0.4英寸] Avinash Kak Purdue University [0.1in]](/simg/3\357f0a8972ed7f16d6f5752185084fc8c126d345.webp)
第一个用于设计深网和DLSTUDIO的火炬介绍[0.4英寸] Avinash Kak Purdue University [0.1in]
对抗性学习类通过训练生成器 - 分歧仪对进行数据建模,其中生成器的作业是输出看起来像培训数据集中的数据示例,而歧视器的作业是尽力不信任生成器的输出。另一方面,GenerativeDiffusion类通过将训练图像逐渐弥补,直到被散布的Markov过渡来进行数据建模,直到它变成纯粹的噪声。此过程称为正向过程,与反向过程相互作用,该过程以纯粹的各向同性高斯噪声开头,然后逐渐降解以恢复训练图像。DeNoiser的可学习参数成为您正在寻找的概率数据模型。

夸克和胶子喷流产生的量子扩散模型
扩散模型在图像生成方面表现出色,但它们的计算量大且训练耗时。在本文中,我们介绍了一种新型扩散模型,该模型受益于量子计算技术,可以减轻计算挑战并提高高能物理数据的生成性能。全量子扩散模型在前向过程中用随机酉矩阵取代高斯噪声,并在去噪架构的 U-Net 中引入变分量子电路。我们对来自大型强子对撞机的结构复杂的夸克和胶子喷流数据集进行了评估。结果表明,全量子和混合模型在喷流生成方面可与类似的经典模型相媲美,凸显了使用量子技术解决机器学习问题的潜力。

MRI图像使用U-NET和图像处理技术
Kush Vora Ninad Mehendale *计算机工程系电子系K.J Somaiya工程学院K.J.Somaiya工程学院孟买,印度孟买,印度kush.v@somaiya.edu ninad@somaiya.edu摘要 - 脑肿瘤是死亡的主要原因之一,因此,尽早诊断它们至关重要。 MRI是检测肿瘤的最有效诊断工具。 但是,热噪声,温度波动和其他伪影可能会产生嘈杂的MRI扫描,从而导致诊断不准确。 深度学习算法与图像处理技术结合使用,已在各种医学成像任务中有助于增强MRI图像。 我们的工作提出了一个带有两个编码器码头对的U-NET体系结构,用于降解MRI扫描,该扫描在通过注入合成高斯噪声生成的数据集上进行了细微的调整。 该模型将峰信号与噪声比(PSNR)从11.90提高到30.96。 提出的工作还提供了经验证据,表明拟议的deoising策略可将脑肿瘤的预测准确性提高近23%。 使用U-NET开发的去核技术将使放射科医生和计算机辅助诊断系统(CAD)在精确诊断疾病中通过产生清洁剂和更清晰的MRI扫描来使其受益。 关键字 - 图像增强,脱氧,U-NET,脑肿瘤,高斯噪声I. i ntroduction a脑肿瘤是一团异常的脑细胞。 封闭人脑的头骨非常坚硬,因此在这个紧密区域内的任何发展都会导致重大并发症。 随着这些肿瘤的生长,头骨内部的压力会增加,从而导致脑损伤。Somaiya工程学院孟买,印度孟买,印度kush.v@somaiya.edu ninad@somaiya.edu摘要 - 脑肿瘤是死亡的主要原因之一,因此,尽早诊断它们至关重要。MRI是检测肿瘤的最有效诊断工具。但是,热噪声,温度波动和其他伪影可能会产生嘈杂的MRI扫描,从而导致诊断不准确。深度学习算法与图像处理技术结合使用,已在各种医学成像任务中有助于增强MRI图像。我们的工作提出了一个带有两个编码器码头对的U-NET体系结构,用于降解MRI扫描,该扫描在通过注入合成高斯噪声生成的数据集上进行了细微的调整。该模型将峰信号与噪声比(PSNR)从11.90提高到30.96。提出的工作还提供了经验证据,表明拟议的deoising策略可将脑肿瘤的预测准确性提高近23%。使用U-NET开发的去核技术将使放射科医生和计算机辅助诊断系统(CAD)在精确诊断疾病中通过产生清洁剂和更清晰的MRI扫描来使其受益。关键字 - 图像增强,脱氧,U-NET,脑肿瘤,高斯噪声I. i ntroduction a脑肿瘤是一团异常的脑细胞。封闭人脑的头骨非常坚硬,因此在这个紧密区域内的任何发展都会导致重大并发症。随着这些肿瘤的生长,头骨内部的压力会增加,从而导致脑损伤。脑肿瘤分为两种不同类型。恶性(癌)和良性(非癌症)。这些肿瘤进一步分为原发性和继发性肿瘤(转移性肿瘤)。原发性脑肿瘤起源于大脑内部,但是当癌细胞从其他器官传播到大脑(肺部到大脑)时,转移性脑肿瘤就会发展。绝大多数原发性脑肿瘤都不癌。死亡率的第十个主要原因是脑肿瘤。在2020年,全球估计,有251,329人死于原发性恶性脑和中枢神经系统(CNS)肿瘤。今天在美国,估计有70万人受到原发性脑肿瘤的影响。这些肿瘤可能是致命的,并对生活质量产生重大影响。女性比男性更有可能获得任何类型的大脑或脊髓肿瘤,而男性则更有可能患上恶性肿瘤。这主要是因为某些类型的肿瘤在一种性别或另一种性别中更为普遍(例如,脑膜瘤在女性中更为常见)。患有恶性大脑或中枢神经系统肿瘤患者的5年生存率

基于加权的生成性学习损失的基于扩散的语音增强
基于扩散的生成模型最近在语音增强(SE)方面获得了研究,为常规监督方法提供了替代方案。这些模型将干净的语音训练样本转化为高斯噪声,通常以嘈杂的语音为中心,随后学习了一个典型的模型以扭转这一过程,从而有条件地在嘈杂的语音上。与受监督的方法不同,基于生成的SE通常仅依赖于无监督的损失,这可能会导致条件嘈杂的语音效率较低。为了解决这个问题,我们提议以ℓ2的损失来增加原始的扩散训练目标,以测量地面真相清洁语音与每个扩散时间阶段的估计之间的差异。实验结果证明了我们提出的方法的有效性。