XiaoMi-AI文件搜索系统
World File Search System高斯
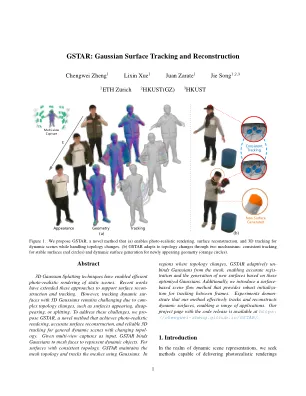
gstar:高斯表面跟踪和重建
从任意观点以及适应不断变化的拓扑结构的表面重构。涉及人类或机器人相互作用与物体的场景需要动态适应分裂,合并或变形的表面。热热,下游应用,例如视觉效果和无标记运动捕获,从不依赖模板的情况下跟踪持久区域的能力显着。因此,方法必须有效地处理这些拓扑更改,以确保高质量的渲染和准确的重建,同时还要维护对现有表面的同意跟踪。经典方法主要依赖于网格和tex曲线图,这些图提供了合理的外观,但重大取决于网格分辨率。他们常常无法准确地确定细节和观察依赖性效果。al-尽管这些网格表示可以进行一定程度的跟踪,但它们努力处理重大的拓扑变化,需要新的关键帧以适应ma-jor变换。神经辐射场的出现(NERF)[28]在静态[1,46]和dy-namic场景[17,30]的外观和新型综合方面有了显着改善。使用Marting Cubes [37,44]可以从隐式签名的距离功能(SDF)得出表面,但除非使用了不足的模板,否则它们缺乏一致的跟踪。最近,出现了3D高斯脱落(3DGS)[20],具有明确的纹理代表,在外观上与NERF竞争,同时实现了更有效的效果。这些高斯人与网格面一起移动,以表示移动和变形的对象。其明确表示有助于跟踪,并为此开发了几种技术[26,50]。然而,准确的动态表面重建仍然是一个挑战,并且在现有表面的跟踪与引入新的表面保持平衡被证明很困难。为了应对这些挑战,我们提出了GSTAR,该方法能够重建光真逼真的外观和准确的表面几何形状,并随着拓扑变化而保持一致的跟踪。GSTAR利用多视图盖,并将网眼与绑定的高斯人结合在一起,与高斯表面相结合。当新的表面变得可见时,新的高斯人会产生,并且网格拓扑更新。适应性网格提供了时间一致,准确的几何形状,而高斯人则带来了逼真的外观。这个问题很困难,因为总会有一个折扣。可以通过固定的托架或模板[24,50]更轻松地跟踪的方法倾向于在新的姿势或变形下降低外观和几何形状的质量。相反,过度拟合静态场景的方法[8,14,16]缺乏时间一致性或错过新的框架详细信息。GSTAR通过尽可能多地跟踪面孔来解决这一权衡
非高斯随机激励的疲劳寿命
能够评估结构在受到尖峰态随机激励的情况下的疲劳寿命的主要好处之一是创建加速测试定义。这个想法是将特定的峰度值与给定的功率谱密度 (PSD) 相关联,以减少暴露时间,同时包含与原始稳态和高斯随机测试相同的疲劳损伤潜力。在实践中,工程师将能够模拟某些商用振动控制系统的峰度控制能力对被测设备所经历的疲劳损伤的影响。此过程将使用基于 FE 的疲劳分析工具实现,其中用户指定激励 PSD、峰度值和 FE 结果文件,该文件表示将激励与测试物品的 FE 模型的每个节点或元素处的应力响应联系起来的频率响应函数。获得应力响应 PSD 和相关响应峰度,并提取统计雨流直方图。然后通过将统计雨流直方图与材料疲劳曲线相关联来得出疲劳寿命估计值。
非...的确定性高斯转换协议
在连续变量量子技术的背景下,高斯状态和操作通常被视为自由可用的,因为它们相对容易通过实验获得。相比之下,非高斯状态的生成以及非高斯操作的实施则带来了重大挑战。这种分歧促使人们引入非高斯性的资源理论。对于任何资源理论,确定资源之间的自由转换协议(即非高斯状态之间的高斯转换协议)具有实际意义。通过系统的数值研究,我们通过任意确定性的一对一模式高斯映射解决了实验相关的单模非高斯状态之间的近似转换。首先,我们表明,对于有限能量,猫状态和二项式状态大致等效,而这种等效性以前仅在无限能量极限下才为人所知。然后,我们考虑从光子增加和光子减少的压缩态生成猫态,通过引入额外的压缩操作来改进已知方案。我们开发的数值工具还允许人们设计出三压缩态到立方相态的转换,超越之前报道的性能。最后,我们确定了其他各种不可行的转换。

流式优化的3D高斯脱落
3D高斯脱落(3DGS)已成为一种开创性的3D场景表示技术,提供了前所未有的视觉质量和渲染效率。但是,3DGS场景的大量数据卷在流媒体上构成了重大挑战。现有对3DGS的研究主要集中在压缩和提高效率上,忽略了流传输的具体质量。此外,3DG中的球形谐波颜色表示使基于视口的传输分配复杂化。在没有明显质量下降的情况下实现层次结构高斯流也是一个重大挑战。为了应对这些挑战,我们提出了SRBF-Gaussian,这是一种彻底改变传统3DGS格式的新范式。我们的方法基于球形径向基础函数(SRBF)和HSL颜色空间引入了与视口有关的颜色编码,从而可以选择性地传输与视口相关的颜色数据。这在保持视觉质量的同时减少了数据传输。我们实施自适应高斯修剪和传输,以适应当前的视口和网络条件。补充 - 我们开发了连贯的多级高斯表示,以在质量水平之间平稳过渡。我们的系统结合了用户 - 行为感知的流策略,以预测和预先提取相关数据。在云VR方案中,我们的方法表明了实质性改善,PSNR增长了5.63%-14.17%,延迟下降7.61%-59.16%,总体经验质量(QOE)提高了10.45%-30.12%。
非高斯随机激励的疲劳寿命
哲学博士学位论文 非高斯随机激励下的疲劳寿命 Frédéric Kihm 本论文介绍了分析机械部件在各种随机激励和随后的机械振动下的疲劳寿命的几种进展。通常,组件必须以这样的方式设计,即它们可以承受环境条件的影响而不被损坏。必须使用实验室测试或有限元 (FE) 计算来验证其设计。通常,设计和测试是根据内部、国家或国际标准的规范进行的,隐含的假设是,如果设备在特定环境中幸存下来,它也将在使用中承受振动。

时空锚定的生成4D高斯
摘要。预先训练的扩散模型和3D一代的最新进展促使人们对创建4D含量促进了兴趣。然而,实现高保真4D代的时空一致性仍然是一个挑战。在这项工作中,我们提出了STAG4D,这是一个新颖的框架,将预训练的扩散模型与动态3D高斯式相结合,用于高保真4D代。从3D生成技术中汲取灵感,我们利用多视图扩散模型来初始化锚定在输入视频帧上的多视图图像,在该框架上可以通过视频扩散模型捕获或生成视频。为了确保多视图序列初始化的时间一致性,我们引入了一种简单而有效的融合策略,以利用第一个框架作为自我注意计算中的时间锚。使用几乎一致的多视图序列,我们应用得分蒸馏采样以优化4D高斯点云。4D高斯吐痰是专门为生成任务而设计的,其中提出了一种自适应致密化策略,以减轻不稳定的高斯疗程以进行强大的优化。值得注意的是,所提出的管道不需要对扩散网络进行任何预训练或微调,而为4D代任务提供了更容易且更实用的解决方案。的实验实验表明,我们的方法优于先前的4D代作品在呈现质量,时空的一致性和生成鲁棒性方面起作用,从而为4d代创造了新的最先进的产品,从不同的投入中,包括文本,图像和视频。

基于语言引导的杂种高斯扩散
摘要 - 在机器人操纵任务中,实现操纵对象的可识别目标状态通常对于促进机器人臂的运动计划至关重要。具体来说,在悬挂杯子等任务中,必须将杯子放置在钩子周围可行区域内。先前的方法已经揭示了杯子的多个可行目标状态的产生;但是,这些目标状态通常是随机生成的,缺乏对特定生成位置的控制。此限制使这种方法在存在约束的情况下,例如其他杯子已经占据的钩子或必须达到特定的操作目标时。此外,由于在现实世界中悬挂的方案中杯子和机架之间的频繁物理相互作用,因此从端到端模型中生成的目标状态通常会导致重叠点云。这种重叠会对机器人组的后续运动计划产生不利影响。为了应对这些挑战,我们提出了一种语言引导的混合高斯扩散(LHGD)网络,用于生成操纵目标状态,并结合了基于重力覆盖系数的基于重力覆盖率的基于重力覆盖率的方法。为了在语言指定的分布设置下评估我们的方法,我们在5个不同的架子上收集了多种可行的目标状态,用于10种不同的架子上的10种类型的杯子。此外,我们为验证目的准备了五种看不见的杯子设计。实验性调查表明,我们的方法在单模,多模式和语言指定的分布操纵任务中达到了最高的成功率。此外,它大大降低了点云的重叠,直接产生无碰撞的目标状态,并消除了机器人臂对额外的避免避免障碍物操作的需求。

流体动力学的高斯闭合建模
在海洋工程中,计算流体动力学(CFD)模型对于模拟时间敏感的情况至关重要,例如预测溢油以及在海上进行搜索和救援操作。因此,创建可以有效,准确模拟实时数据的CFD模型至关重要。当前的CFD模型分为两类:慢速且计算上昂贵但准确的细化高保真模型,并且速度快,便宜但通常不准确。为了开发一个平衡计算成本和准确性的模型,我们建议使用稀疏变分高斯工艺进行闭合建模。我们模拟了二维流体流的理想情况,并通过圆柱障碍物越过,并增强了具有三种高保真模型的三种不同离散化的低保真模型。在所有离散化中,我们的增强低保真度模型保留了与高保真模型的高度准确性和相似性,并且与标准的低保真模型相比,误差明显少得多。因此,我们发现高斯过程可以有效地用于闭合流体流量。

语言插入的高斯碎片(腿)
摘要 - 构建语义3D地图对于搜索官方,仓库,商店和房屋感兴趣的对象很有价值。我们提出了一个映射系统,该系统会逐步构建一种语言包裹的高斯splat(腿):详细的3D场景表示形式,该表示同时编码外观和语义是在统一的表示中。腿在网上训练,因为机器人遍历其环境,以便可以定位开放式对象查询。我们在4个房间场景上评估了腿部,在该场景中我们查询场景中的物体,以评估腿如何捕获语义含义。我们将腿与LERF [1]进行了比较,并发现尽管两个系统都具有可比的对象查询率,但腿的训练速度比LERF快3.5倍。结果表明,多相机设置和增量捆绑捆绑调节可以提高受约束的机器人轨迹的视觉重建质量,并建议腿可以定位开放式播放器和长尾对象查询,其精度高达66%。请参阅项目网站:berkeleyautomation.github.io/legs
线性二次高斯控制系统的设计...
有几种不同类型的控制方法可用于线性和非线性系统。这些控制方法需要简单到复杂的控制器。在本项目中,通过获取状态空间模型并检查不同控制方法的开环和闭环响应来分析无尾翼火箭的俯仰稳定性。此外,根据线性二次调节器 (LQR) 的响应评估了简单但强大的比例、积分、微分 (PID) 控制器的响应。由于实际应用和案例的局限性,开发了卡尔曼滤波器 (最佳估计器) 来充分观察和获取必要的状态变量。最终,将 LQG 和卡尔曼滤波器结果和增益结合起来以获得线性二次高斯 (LQG) 控制器响应。每个部分都将定义、推导和实现必要的函数到 MATLAB 和 Simulink 中以获得最佳响应。