机构名称:
¥ 1.0
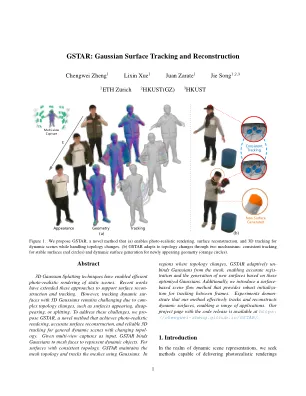
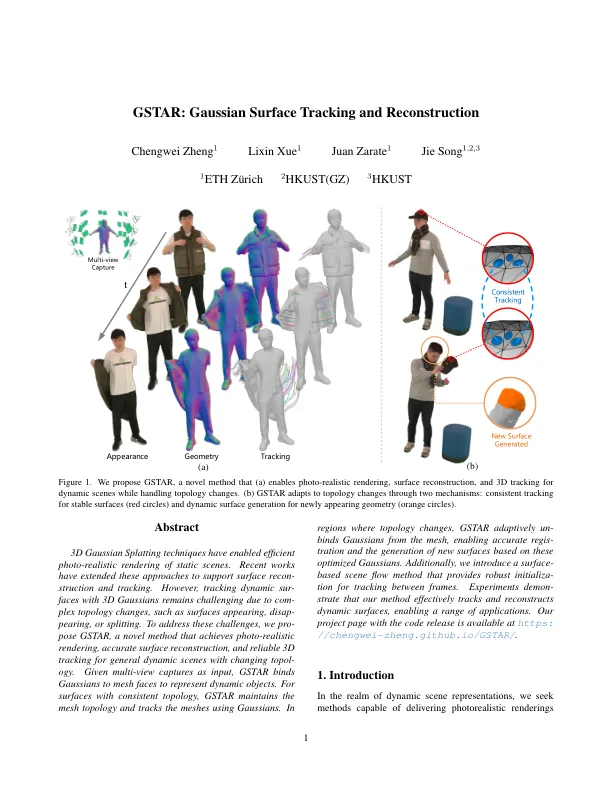
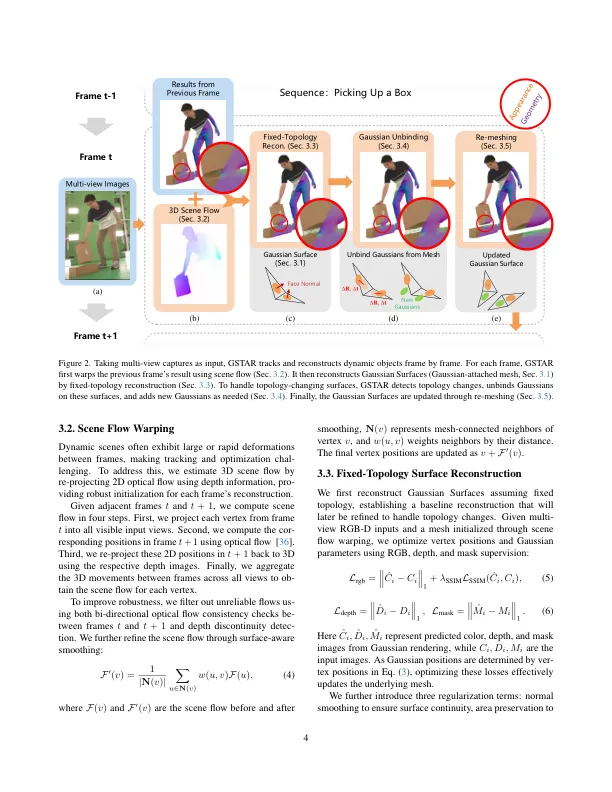
从任意观点以及适应不断变化的拓扑结构的表面重构。涉及人类或机器人相互作用与物体的场景需要动态适应分裂,合并或变形的表面。热热,下游应用,例如视觉效果和无标记运动捕获,从不依赖模板的情况下跟踪持久区域的能力显着。因此,方法必须有效地处理这些拓扑更改,以确保高质量的渲染和准确的重建,同时还要维护对现有表面的同意跟踪。经典方法主要依赖于网格和tex曲线图,这些图提供了合理的外观,但重大取决于网格分辨率。他们常常无法准确地确定细节和观察依赖性效果。al-尽管这些网格表示可以进行一定程度的跟踪,但它们努力处理重大的拓扑变化,需要新的关键帧以适应ma-jor变换。神经辐射场的出现(NERF)[28]在静态[1,46]和dy-namic场景[17,30]的外观和新型综合方面有了显着改善。使用Marting Cubes [37,44]可以从隐式签名的距离功能(SDF)得出表面,但除非使用了不足的模板,否则它们缺乏一致的跟踪。最近,出现了3D高斯脱落(3DGS)[20],具有明确的纹理代表,在外观上与NERF竞争,同时实现了更有效的效果。这些高斯人与网格面一起移动,以表示移动和变形的对象。其明确表示有助于跟踪,并为此开发了几种技术[26,50]。然而,准确的动态表面重建仍然是一个挑战,并且在现有表面的跟踪与引入新的表面保持平衡被证明很困难。为了应对这些挑战,我们提出了GSTAR,该方法能够重建光真逼真的外观和准确的表面几何形状,并随着拓扑变化而保持一致的跟踪。GSTAR利用多视图盖,并将网眼与绑定的高斯人结合在一起,与高斯表面相结合。当新的表面变得可见时,新的高斯人会产生,并且网格拓扑更新。适应性网格提供了时间一致,准确的几何形状,而高斯人则带来了逼真的外观。这个问题很困难,因为总会有一个折扣。可以通过固定的托架或模板[24,50]更轻松地跟踪的方法倾向于在新的姿势或变形下降低外观和几何形状的质量。相反,过度拟合静态场景的方法[8,14,16]缺乏时间一致性或错过新的框架详细信息。GSTAR通过尽可能多地跟踪面孔来解决这一权衡
gstar:高斯表面跟踪和重建
主要关键词



相关文件推荐