XiaoMi-AI文件搜索系统
World File Search SystemBev
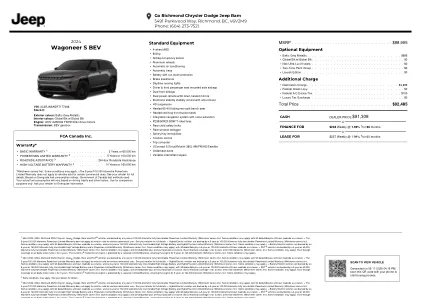
Wagoneer S Bev
5年/100,000公里的动力总成有限保修不适用于用于某些商业用途的车辆。有关详细信息,请参见您的零售商。+混合动力汽车由5年或100,000公里的完全可转让的动力总成有限保修(以先到者为准。某些条件可能适用)$ 0免赔额加24小时的路边援助,以及8年或160,000公里的完全可转移的高压电池和混合系统有限保修(以第一为例为准。某些条件可能适用。)+电池电动汽车由8年或160,000公里的完全可转移的高压电池和电子通行有限保修(以先到者为准。某些条件可能适用)$ 0免赔额,以及5年或100,000公里的24小时路边援助。+ SRT车辆由3年或60,000-®
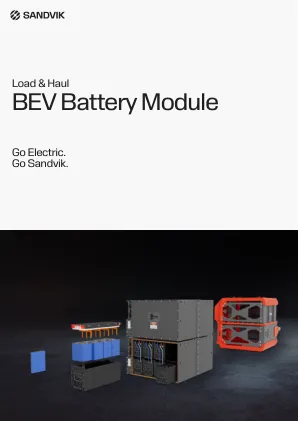
BEV电池组中的连接零件
最近,电动汽车的传播一直在随着燃油效率和各个国家通过减少CO 2排放而采用的排放控制政策的加速。到2035年,电动汽车的销售比率预计将显着增加到约88%,这是当前水平的五倍以上。使用电池电动汽车(BEV)预计约为58%,汽车制造商一直在进一步加速BEV的发展。同时,BEV在里程和快速充电时间方面存在问题,这在很大程度上取决于电池组的性能。为了解决这些问题,已经采取了积极的努力来开发可以应对较高能量密度和电流的电池组,以实现较小的空间和更高的容量,同时提高安全性。为了提高电池组的性能,连接电池与功能部件的连接零件也起着关键作用。他们有望提供有助于缩小和节省空间的功能,应对更高的电流以及提高安全性。

电动汽车电池外壳设计解决方案目录
• 近年来,安赛乐米塔尔与许多 OEM 和一级供应商合作开发钢制电池外壳概念 • 很快发现一件事——OEM 之间很少有一致的功能和性能要求! • 一致——箱子必须防水,必须适应内部和外部包装约束 • 可变——负载情况、结构性能标准、冷却策略、保护屏蔽策略、连接策略等。 • 此外,OEM 在平衡质量、成本和性能方面有不同的方法

电池更换研究 纯电动汽车的演变
• 电池更换式纯电动汽车的技术和经济可行性已在中国市场得到检验和认可。这种加油模式可将 EHT 的购买价格降低 50%。 “车辆和电池独立”商业模式意味着运营商只需支付车辆费用,而电池则由电池组拥有和处理,供运营商租用。它通过降低纯电动汽车的运营和维护成本来创造经济效益。它提高了时间和资源利用效率,因为更换电池只需五分钟。与充电模式相比,它还需要更少的能源和土地资源。它提供更安全的电池管理和更高的电池生命周期价值。集中充电提高了电池使用的安全性,并将电池使用寿命延长了 20%。它可以根据配电网的需求更好地安排电池充电。循环市场也正在启动——赋予电池第二次生命业务。

丰田超越特斯拉的纯电动汽车战略评估
丰田长期以来拒绝认真开发电动汽车,导致特斯拉等公司抢占先机,导致公司动态管理能力出现问题。丰田随后改变了立场,采取“全方位战略”,转向专注于电动汽车的政策,同时开始利用适当的产品和成本策略追赶竞争对手。据信,丰田的续航里程和电池成本比特斯拉落后约两年。丰田的管理能力一直很出色,包括完善的运营管理和结构良好的管理控制系统。如果丰田能够通过采用适当的产品和成本策略展示其动态管理能力,它最终将能够提供与特斯拉和其他汽车制造商生产的汽车性能相同、价格相近的汽车。当这些产品在同一领域竞争时,丰田精心培育的可靠性和耐用性可能会超越特斯拉。然而,特斯拉正在迅速提高其普通能力,因此不能过于乐观。

rt-bev:增强自动驾驶汽车的实时BEV感知
查看,捕获车辆导航和决策的基本细节。然而,由于缺乏信息通信和对象检测的合法化,减少端到端(E2E)BEV感知潜伏期而不牺牲准确性是具有挑战性的。先前的工作要么压缩密集检测模型以减少可能损害准确性并假定图像很好地同步的计算,要么集中于最坏情况的通信延迟而不考虑对象检测的特征。为了应对这一挑战,我们提出了RT-BEV,这是旨在将消息通信和对象检测配合的第一帧工作,以改善实时E2E BEV感知而不牺牲准确性。RT-BEV的主要见解在于为了确保AV安全性的发电环境和上下文感知的感兴趣的区域(ROI),并结合Roi Awawaweawears的消息通讯。rt-bev具有ROI Aware Camera Synchronizer,该相机同步器根据ROI的覆盖范围自适应地确定消息组和允许延迟。我们还开发了一个ROI Generator来建模上下文感知的ROI和功能拆分和合并Component,以有效处理可变大小的ROI。此外,时间预测指标预测了处理ROI的时间表,并且协调员共同优化了整个E2E管道的延迟和准确性。我们已经在基于ROS的BEV感知管道中实现了RT-BEV,并使用Nuscenes数据集进行了评估。此外,RT-BEV显示可将最坏情况的E2E潜伏期减少19.3倍。rt-bev显示可显着提高实时BEV感知,使平均E2E潜伏期降低1.5倍,保持高平均平均精度(MAP),将处理的帧数增加一倍,并提高框架效率分数(FES),而不是现有方法相比。

H-V2X:BEV感知的大型高速公路数据集
摘要。车辆到全部用途(V2X)技术已成为路边基础感知数据集,因此已成为研究领域。但是,这些数据集主要关注城市交叉点,并且缺乏公路方案的数据。此外,数据集中的感知任务主要是由于跨多个传感器的同步数据,因此主要是单声道3D。为了弥合这一差距,我们提出了高速公路-V2X(H-V2X),这是第一个大型高速公路鸟类视图(BEV)感知数据集,由传感器在现实世界中捕获。数据集覆盖了超过100公里的高速公路,并具有多种道路和天气状况。h-v2x由超过190万个BEV空间中的精细粒度分类样品组成,由多个同步摄像机捕获,并提供了矢量图。我们进行了联合2d-3d校准,以确保涉及正确的投影和Human劳动,以确保数据质量。此外,我们针对公路方案提出了三个高度相关的任务:BEV检测,BEV跟踪和轨迹预测。我们为每个任务进行了基准,并提出了包含向量图信息的创新方法。我们希望H-V2X和基准方法将促进BEV感知研究方向的高速公路。该数据集可从https://pan.quark.cn/s/86d19da10d18