XiaoMi-AI文件搜索系统
World File Search SystemContinua
continua factsheet_f1的内容
绿色和可持续行业价值链的可持续性按大规模的可持续性是Continua™SCM的关键不同,并得到了技术专长的支持,并得到了Birla Carbon的信任和信誉的支持。Continua™SCM解决方案以其圆形性质,可以减少大型且能够量化的碳足迹,为更绿,清洁和更可持续的行业价值链铺平道路。在接下来的几年中,每年将使用73,000吨Continua™SCM产品用于多种应用,包括轮胎,机械橡胶产品,塑料,涂料等。

人工智能应用组件布局和计算连续体资源选择的随机贪婪方法
人工智能 (AI) 和深度学习 (DL) 现已无处不在,应用范围从个人助理到医疗保健。如今,随着移动计算和物联网的加速迁移,广泛的终端设备会产生大量数据,这决定了边缘计算范式的兴起,在这种范式中,计算资源分布在具有高度异构容量的设备之间。在这种分散的情况下,高效的组件放置和资源分配算法对于最佳地协调计算连续资源至关重要。在本文中,我们提出了一种工具,可在设计时有效解决 AI 应用程序的组件放置问题。通过随机贪婪算法,它可以确定在异构资源(包括边缘设备、基于云 GPU 的虚拟机和功能即服务解决方案)中提供性能保证的最低成本放置位置。
实时和间歇扫描连续血糖监测:2 型糖尿病控制的进展和应用
目前,MCG 系统是帮助我们实现血糖控制目标的工具,而迄今为止,毛细血管血糖 (BG) 测量 2 则不然。尽管 MCG 在 1 型糖尿病 (DM1) 患者中的应用十分广泛,但在 DM2 患者中却并不那么普及,但预计未来几年其应用将会越来越广泛。国家卫生系统和药房共同服务总局发布的决议规定了接受多剂量胰岛素治疗的 2 型糖尿病患者使用 MCG 系统 3 的可及性标准。这项决议赋予我们初级保健医生开具该药物的权力,因为它认为这是大多数 2 型糖尿病患者接受治疗的医疗保健环境。

环境,森林和气候变化部关于讨论与有关危险a
此事最后一次在2024年11月29日举行的第139届EC会议上讨论,委员会发现,Birla Carbon已经在欧洲引入了Continua Continua品牌,用于欧洲的可持续碳质材料,并宣布了与Finster合作进行同样的计划。他们正在考虑升级Finster的设施和实验室,这将需要大量投资。还指出,轮胎公司的耗材通常涉及中长期合同,保证原材料的供应将有助于捆绑此类合同。委员会还希望知道申请人将采取哪些步骤来在国内采购材料,以及他们将如何确保所有进口材料仅用于制造RCB。委员会在听取申请人的意见后建议申请人在会议上提供的详细信息,以便在TRC会议上的此事中进行进一步审议/决定。


在幼儿园设定3岁儿童的高期望
QKLG的学习与发展连续性在计划和评估三岁孩子的教育经验时提供了必不可少的指导。Continua强调,学习是每个孩子反映其个人成长和需求的独特经历。连续图的目的是支持“时间点”评估和计划决策,以支持和促进个人以有意义和相关的方式学习个人。例如,遵循一系列的故事时间会议和经验探索感受,教育者可能会注意到,一个孩子在熟悉的情况下开始认识并命名自己的情绪,并且在更陌生的情况下,明确的支持是巩固并应用这些技能。认真的观察和对儿童学习时刻的真正欣赏,促进了信任,并促进了更多个性化的教育支持。
天体物理辐射传输简介
1 简介 1 1.1 为什么要写这本书? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.4.2.1 光谱线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 1.4.5 光学薄和光学厚 . ...

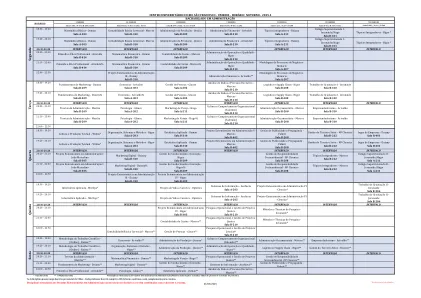
q ua q uin ta s exta s e g un
与行政扩展项目相关的学科将在时代与老师和班级结合。*的时间为更新%,该学科的面孔是-face的工作量为30小时 - 每个老师必须连续遇到CH,而无需事件的补充。