XiaoMi-AI文件搜索系统
World File Search SystemCube

教育ASV 201022
Cube Orange Autopilot三重冗余IMU的内部晴雨表双冗余电源双重供应二可以外围接口5通用串行接口端口端口端口3 GNSS接收器RTK RTK支持(Centimeter Level Supperication,tit Base Station具有基本站点)的整合指南针,ASPELEREREMERMONEL和GYROSPOPE。
ES250 和 ES450 - 图特布莱恩特电力
Infinity Cube 最适合具有间歇性或高电流负载特性的设备,例如塔式起重机、载人升降机、配料机和焊机。其他常见应用包括偏远地区社区、建筑工地基本负载、起重机和土方设备等电气化工厂以及电网稳定应用。
电子学习2/div>
›本教程的目的是什么?。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。6› ECAT-属性。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。7›变焦锅轨道。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。10›渲染模式。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12›机器人慢跑。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。14› CAD导入。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17›位置组件。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>20> PNP食品。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>24>工具和基础配置。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>26>定义家庭位置。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>29>机器人程序“ Take Cube”。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。31›机器人程序“ Drop Cube”。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。35›机器人程序“结构”。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。39›机器人程序“抓紧原理”。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>43>更改点设置。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。45›导出3D PDF。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。48
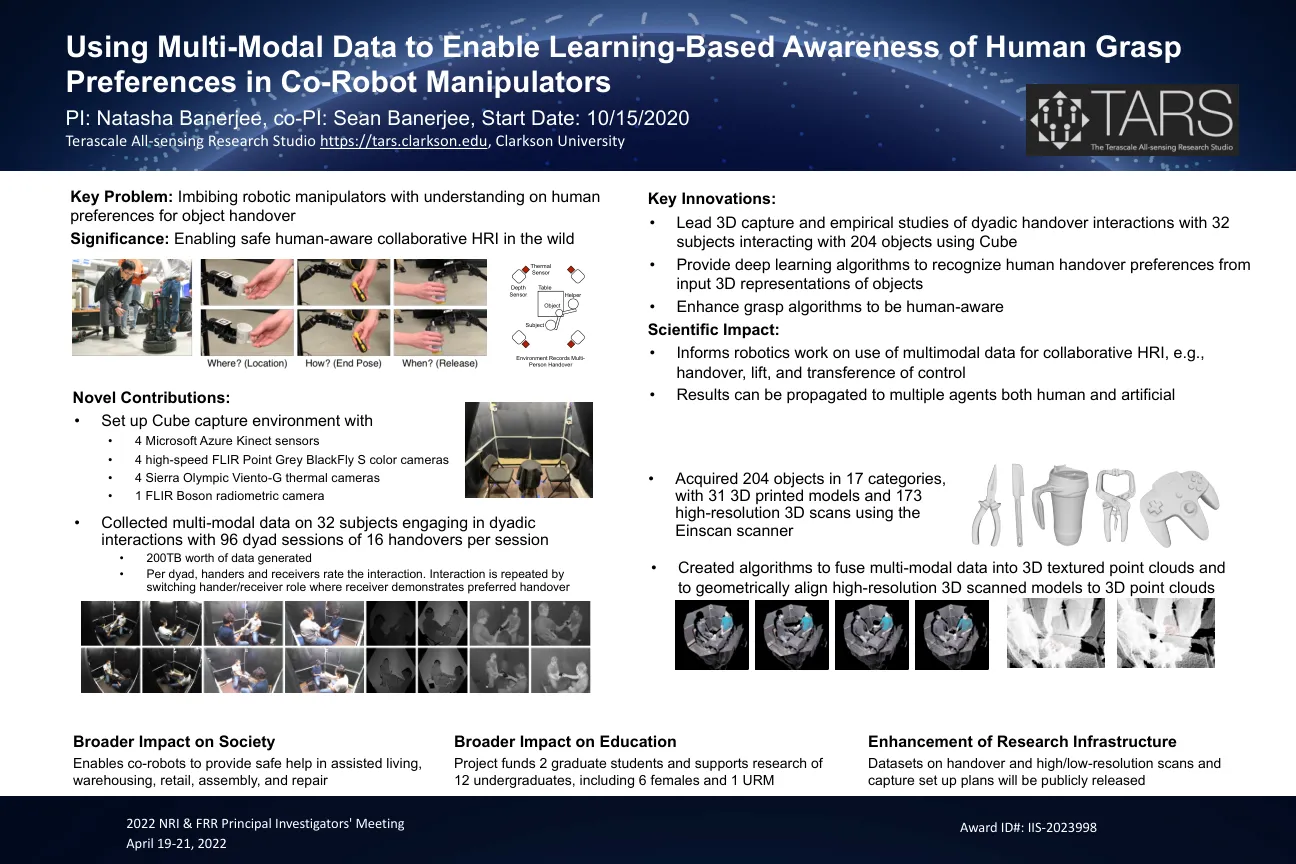
使用多模式数据来实现基于学习的人类掌握偏好的认识
•铅3D捕获和经验研究与32个受试者使用Cube与204个对象相互作用的二元移交相互作用•提供深度学习算法,以识别物体输入3D表示的人类移交偏好•增强掌握算法是人为意识到的科学影响:

加州大学圣地亚哥分校
1-1:线框内克尔立方体................................................................................................1 1-2:内克尔立方体详述...............................................................................................3 1-3:内克尔立方体解析...............................................................................................4 1-4:传导.......................................................................................................................20 1-5:感知.......................................................................................................................23 1-6:认知.......................................................................................................................23 1-7:发音.......................................................................................................................25 1-8:话语.......................................................................................................................26 1-9:档案(非时间模型).............................................................................................32 2-1:斯蒂尔转录样本.....................................................................................................85 2-2:帕尔默的六种音调模式.....................................................................................95 2-4:音调模式生成器的实际应用................................................................................124 2-5:基线单位................................................................................................127 2-6:焦点、预设和断言..............................................................................155 3.8:直接图像比例符号(Ø)................................................................175
加州大学圣地亚哥分校 突出表现
1-1:线框内克尔立方体................................................................................................1 1-2:内克尔立方体详述...............................................................................................3 1-3:内克尔立方体解析...............................................................................................4 1-4:传导.......................................................................................................................20 1-5:感知.......................................................................................................................23 1-6:认知.......................................................................................................................23 1-7:发音.......................................................................................................................25 1-8:话语.......................................................................................................................26 1-9:档案(非时间模型).............................................................................................32 2-1:斯蒂尔转录样本.....................................................................................................85 2-2:帕尔默的六种音调模式.....................................................................................95 2-4:音调模式生成器的实际应用................................................................................124 2-5:基线单位................................................................................................127 2-6:焦点、预设和断言...............................................................................155 3.8:直接图像比例符号 ( � )........................................................................175
法国机场技术 - 法国民航服务公司
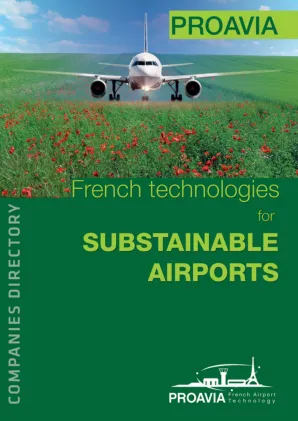
01dB 和 ECOTECH、ACOEM 品牌为包括机场环境管理在内的多种应用提供防止和控制空气、噪音、振动污染的解决方案。我们提供具有高可靠性的全自动综合噪音和航班跟踪管理解决方案。该解决方案由经批准的 DUO 或 CUBE 智能噪音监测器和 AEROVISION 监控网络服务组成,使机场管理人员能够根据环境噪音法规实施可持续发展政策。

确保物联网设备之间的医疗信息传输:基于量子步行,DNA编码和混乱的创新混合加密方案
由于广泛使用先进的通信技术和无线传感器网络,例如医疗互联网(IOMT),健康信息交换技术(HIET),医疗保健互联网事物(IOHT)和Health IOT(HIOT),医疗保健行业已经进行了转变。这些技术导致医疗数据(尤其是医学成像数据)在各种无线通信渠道上的传输增加。但是,通过不安全的互联网渠道(如互联网和通信网络)(如5G)传输高质量的彩色医学图像,带来了可能威胁患者数据隐私的重大安全风险。此外,此过程还可能负担通信通道的有限带宽,从而导致数据传输延迟。为了解决医疗保健数据中的安全问题,研究人员将大量关注放在医疗图像加密上,作为保护患者数据的一种手段。本文提出了一种彩色图像加密方案,该方案集成了多个加密技术,包括替代量子随机步行,受控的魔方立方体变换,以及椭圆曲线加密系统与山地密码(ECCHC)的集成。所提出的方案通过分层固定尺寸的平面来创建常规立方体,从而将各种明文图像划分。每个平面沿逆时针方向旋转,然后进行行,柱和面部交换,然后进行DNA编码。将用DNA编码的图像立方与混沌立方通过DNA结合在一起,并选择了几个随机DNA序列以进行DNA突变。进行DNA突变后,然后使用DNA解码编码的立方体。提出的方法具有通过使用无限大的立方体加密无限尺寸和数字的2D图像的理论能力。已通过各种实验模拟和网络攻击分析对所提出的图像加密方案进行了严格测试,这显示了所提出的加密方案的效率和可靠性。
生物医学工程技术学士...
Complex Numbers: Properties of complex numbers: Conjugates and modulus: Geometrical representation of complex numbers: Quadratic Equations & Cube Roots: Roots of a quadratic equation (real: distinct: equal and imaginary roots): Formation of quadratic equation when the roots are given: Cube Root of Unity: Properties of cube root of unity: Matrices: Properties: sum: difference and multiplication of matrices: Cramer's rule: Solution of linear equations of three unknowns: Determinants: Properties: addition: subtraction and multiplication of determinants: Sequence and series: Arithmetic progression: Standard forms of an arithmetic progression: Arithmetic means: Geometric progression: Standard forms of a geometric progression: Sum of Infinite geometric series: Geometric means: Harmonic progression: Harmonic means: Relation between H.M.: A.M.和G.M.: Binomial Expansion: Expansion of type (a+b) n for positive integer of 'n': Use of the general term and determine the middle term or terms of the expansion: Partial Fractions: Resolve into partial fractions: Proper and improper fraction: Functions: One-one function: Onto function: Even function: Odd function: Exponential function: Trigonometric function: Logarithmic function: Circular Measure: Understand the definition of radians and使用弧度与学位之间的关系:三角函数:基本功能,例如正弦:余弦:切线等。relation between them: Trigonometric identities: sum and difference formulae: multiple angle formulae: Inverse functions: Differential Calculus: Basic concepts: limits: exponential functions: differentiation of exponents and trigonometric functions: Integral Calculus: Basic integration: rules of integration: integration of exponential and trigonometric functions: integration by parts: integration using substitution: Analytical Geometry: Lines:中点:线方程:角度和部分。