XiaoMi-AI文件搜索系统
World File Search SystemInertial

惯性传感与人工智能相遇:机遇还是……
摘要 — 惯性导航系统(INS)已广泛应用于智能交通系统中提供独立和连续的运动估计。近年来,芯片级惯性传感器的出现将相关应用从定位、导航和移动地图扩展到基于位置的服务、无人系统和交通大数据。同时,受益于大数据的出现以及算法和计算能力的提升,人工智能(AI)已成为在各个领域成功应用的共识工具。本文从传感器设计和选择、校准和误差建模、导航和运动感知算法、多传感器信息融合、系统评估和实际应用等各个方面回顾了利用AI技术增强惯性感知的研究。本文从近300篇相关出版物中筛选出30多篇代表性文章,总结了各个方面的现状、优势和挑战。最后,总结了AI增强惯性传感的九大优势和九大挑战,并指出了未来的研究方向。

大气数据惯性参考系统 (ADIRS)
为了提供 100% 的 RNP 0.1 导航性能可用性和 GPS 中断免疫力,可选霍尼韦尔惯性 GPS 混合 (HIGH) 升级。HIGH 将 MMR 视野中每颗卫星的原始测量值与卡尔曼滤波器相结合,提供高度校准的解决方案,确保操作员准确定位。此功能可用于改装和前装应用,以最大限度地提高航空公司和航线效率。
机翼形状的辅助惯性估计 - oatao
先进的大翼展飞机具有更大的结构灵活性,但可能出现不稳定或操纵性差。这些缺点需要稳定性增强系统,该系统需要主动结构控制。因此,飞行中机翼形状的估计有利于控制非常灵活的飞机。本文提出了一种基于扩展卡尔曼滤波估计柔性结构状态的新方法,该方法利用了辅助惯性导航系统中采用的思想。将不同机翼位置的高带宽率陀螺仪角速度集成在一起,以提供短期独立惯性形状估计解决方案,然后使用额外的低带宽辅助传感器来限制发散估计误差。所提出的滤波器实现不需要飞机的飞行动力学模型,简化了通常繁琐的卡尔曼滤波调整过程,并允许在机翼偏转较大和非线性的情况下进行准确估计。为了说明该方法,通过使用瞄准装置作为辅助传感器的模拟来验证该技术,并进行可观测性研究。与文献中基于立体视觉的先前研究相比,我们发现了一种传感器配置,仅使用一个摄像头和多个速率陀螺仪分别用于卡尔曼滤波更新和预测阶段,即可提供完全可观察的状态估计。

集成惯性/摄像系统的瞄准线校准
集成惯性/相机系统的视轴校准 Mohamed M. R. Mostafa Applanix Corporation 85 Leek Cr., Richmond Hill Ontario, Canada L4B 3B3 电话:(905) 709-4600 分机 274 电子邮件:mmostafa@applanix.com 个人简介 Mohamed Mostafa 负责 Applanix Corporation 机载系统的研究和开发,并担任美国摄影测量和遥感学会直接地理参考委员会主席。他分别于 1991 年和 1994 年获得亚历山大大学理学学士学位和理学硕士学位,并于 1999 年获得卡尔加里大学博士学位。他的研究兴趣是使用多传感器系统进行地图绘制。摘要 集成成像/惯性系统的视轴校准是地图制作的关键因素,尤其是在数字成像传感器的情况下。因此,本文的重点是使用不同方法进行视轴校准。介绍了两种视轴校准方法,即机载和地面方法。传统的机载视轴校准已成功使用了几年,但它不能满足某些机载数字系统的某些操作参数。或者说,这里介绍的地面校准方法从未在典型的数字地图制作中使用过。在本文中,针对数字多传感器系统介绍了机载和地面视轴校准的概念。提供了数据结果和分析,以强调使用这两种方法实现的准确性。1.简介 过去几年,测绘行业一直致力于实施新技术先进的多传感器系统进行地图制作。这些系统目前正在取代传统的航空测绘系统,用于资源测绘和机载遥感等应用,并开始在工程和地籍测绘等其他应用中展开竞争。通常,多传感器数字系统由一个或多个用于图像采集的数字相机系统和 GPS 辅助惯性系统组成

惯性聚变能反应堆的燃料循环
在磁约束聚变 (MCF) 领域,氚燃料循环已得到详尽研究。[1,2,3] 已经开发出处理、监测、从化学结合物种中回收、浓缩和储存氚的技术,其产量接近反应堆相关产量。[4] 关键组件已在大型托卡马克或氚处理设施中进行了测试。[5] 该技术的很大一部分可转移到适用于惯性聚变能 (IFE) 的系统。然而,操作条件与磁性情况有很大不同,因此对 IFE 燃料循环组件施加了 MCF 情况下没有的条件,因此需要针对 IFE 特定主题进行研究。燃料回路由喷射器系统和用于回收反应堆流出物的基础设施组成。MCF 中的颗粒注入是一种将 DT 冰输送到托卡马克等离子体深处的有吸引力的方法。部署在 IFE 反应堆中的目标需要特定的设计来优化燃烧分数,该分数可能高达 1/3。这可能需要不同元素的复合层。湿泡沫等靶概念将由嵌入低密度 CH 泡沫中的液态 DT 组成,也很有前景。MCF 反应堆将在真空中运行,主要成分是氢同位素。一些 IFE 反应堆设计将在中等真空(几托)下运行,主要成分是氖或氙,以帮助缓和冲击波和对第一壁的粒子冲击。MCF 反应堆必须应对等离子体与偏滤器相互作用时产生的灰尘。IFE 反应堆需要将残留的靶碎片与流出物中的挥发性氢物种分离并去除。图 1 提供了 IFE 反应堆的通用燃料循环。作为代表性示例,该设计隐含了在薄壁塑料外壳内分层使用 DT 冰。泡沫填充的液态 DT 靶和更复杂的靶设计(例如采用空腔的靶设计)将需要更广泛的碎片收集和处理子系统(具体取决于细节)。燃料循环包括两个独立的回路:一个回路为反应堆提供燃料,另一个回路用于增殖氚。反应堆流出物被分离成两股:挥发性成分在气体离开反应堆时被低温抽吸,而颗粒碎片则通过重力送入收集器并氧化以将吸收的氢与碳物质分离。低温分离器将氦灰排放到环境中,将氖/氙转移以供再利用,并通过渗透器将氢同位素排放到同位素分离器。同位素分离器将氢排放到环境中,并将氘和氚引导到胶囊工厂和靶填充系统。增殖毯回路有两个主要功能:从反应堆中提取热量和增殖氚。反应堆周围是熔盐池,用于捕获和缓和聚变中子,作为氚增殖的前体。熔盐从反应堆泵出,通过热交换器、杂质去除子系统(用于净化熔盐)、氚提取模块,然后返回到反应堆周围的安全壳中。在 380 MWe IFE 反应堆中,主要物质的摩尔流速为:H、D、T、C、O、He 和 Xe,该反应堆使用封装在薄塑料壳中的 DT 冰靶。20 毫克氚靶以 0.5 Hz 的频率注入。燃烧分数假设为 25%。聚变功率转换为电能的比率假设为 30%。假设工厂占空比为 90%。

惯性定理控制方案的实验验证
1 CAS量子信息信息实验室,中国科学技术大学,Hefei 230026,中华人民共和国2 CAS量子信息与量子物理学卓越卓越中心,中国科学技术大学,230026,Hefei 230026,中国人民共和国3,化学研究所3,耶路撒冷大学,耶路撒大学,耶路撒大学。加利福尼亚大学的物理学,圣塔芭芭拉,加利福尼亚州93106,美利坚合众国5菲西卡学院gal。Milton Tavares de Souza s/n,Gragoatá,24210-346 Niter´Oi,Rio de Janeiro,巴西,巴西6 DepratimentodeFísica,联邦联邦政府De s〜ao Carlos,Rodovia WashingtonLuís,spsp-sp-35-sp-sp-310,135565-955-9565-95-95-95-95-95-95-95-95-95-95-95-95-95-95-95-905-905-905-905 SO.任何信件应被解决。7这些作者对这项工作也同样贡献。
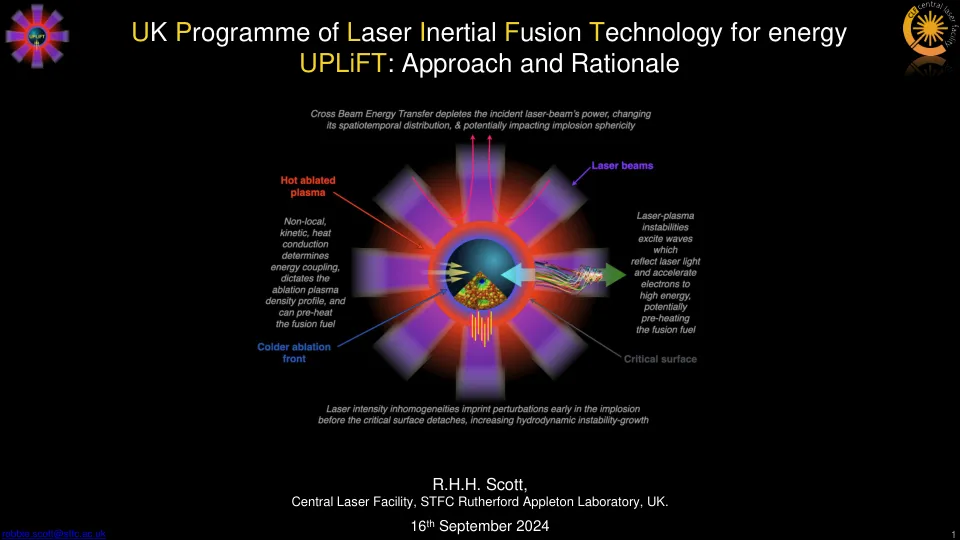
英国激光惯性聚变技术计划...
• 但为什么压缩在 ICF 中如此重要? • 想法: • 固体时 ρ DT = 0.25g/cc • 点火要求:ρR HS > 0.3 g/cm 2 • 对于固体密度 DT => R HS = 1.2cm • 我们不能只将 1.2cm 半径的固体密度 DT 加热到 5 keV 吗? • 不行! • 聚变产量将难以控制 • 输入能量要求巨大(5000 MJ)

用于测试惯性传感器的精确平移运动生成
图 2:平台调整前测量位移的示例图(a)和基本优化后测量位移的示例图(b)。前者和后者情况下测量信号与标称波形的偏差分别放大了 200 倍和 1000 倍。

惯性聚变实验中科学盈亏平衡的能量原理
首次实现了聚变“科学盈亏平衡”(即,目标增益 G 目标为 1,总聚变能量输出 > 激光能量输入)(此处,G 目标 ∼ 1.5)。本文报告了设计变更的物理原理,这些变更导致在国家点火装置上使用激光间接驱动进行首次受控聚变实验,以产生大于 1 的目标增益,并超过了之前根据劳森标准获得的点火所需的条件。成功的关键因素在于减少“滑行时间”(激光脉冲结束和内爆峰值压缩之间的持续时间)和最大化传递到“热点”(聚变燃料的产量产生部分)的内部能量。解释了滑行时间与动能向内能的最大效率转化之间的联系。不对称和流体动力学诱导混合的能量学后果是高产量大半径内爆设计实验和设计策略的一部分。本文展示了不对称和混合如何合并为一个关键关系。结果表明,混合会产生与内爆不对称影响类似的动能成本,从而将点火阈值转移到更高的内爆动能——这一因素通常不包含在广义劳森标准的大多数陈述中,但关键的必要修改显然已经显现出来。

节能惯性驱动器,用于振动机的双频激发
摘要:大规模振动机的电动机的低效率和过多的电动机用于处理散装材料,这激发了惯性驱动器的新设计。此驱动器由一个电动机和两个同轴不平衡的质量组成,其旋转频率与比率2:1相关。这种方法允许产生具有可变振幅和频率的激发力,这取决于惯性特征和轴旋转频率,并且与不平衡质量的相位差无关。因此,可以更改所得矢量hodograph的对称轴。刺激力的光谱成分高达200 Hz含有较高的谐波,其能量份额比第二谐波含量为25.4%,比第三和更高的谐波相比改善了与单频率振动器相比改善散装物质处理的14.1%。有限元模型用于检查双频驱动器最负载单元的强度容量。它的使用允许实现复杂的运动轨迹,这些运动轨迹在技术上更有效地用于处理媒体的可变参数和筛分屏幕和其他振动机中的能源节省。