XiaoMi-AI文件搜索系统
World File Search SystemInspired

今年春天受到启发!
春天在这里,带来了一个增长,更新和联系的季节。本赛季的节目旨在帮助您接受一年中充满活力的时间的能量。对于小孩子来说,Baby&Toddergym和Kindergym等计划提供了学习,社交和发现的培养环境,而家人可以随时随地享受户外纽带。青年可以通过艺术课程来点燃自己的创造力,例如轻松印刷,探索砖块4 Kidz Junior Robotics,或者通过我的身体,体操和运动来建立信心。青少年和成年人有机会潜入诸如开始水彩,远足和创意艺术疗法之类的兴趣。今年春天加入我们,参加激动人心的课程,户外冒险以及各个年龄段的丰富体验。当我们共同创造持久的回忆时,让这个季节成为发现和联系之一。

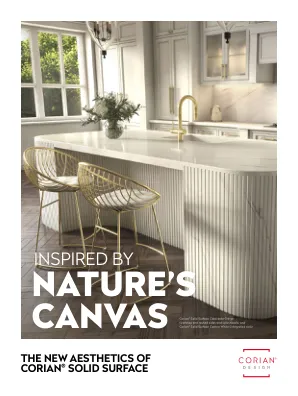
以美为灵感,以价值为驱动
本报告提供有关雅诗兰黛公司(在此称为“公司”、“ELC”或“我们”)的社会影响和可持续发展活动和绩效的信息。内容涵盖我们的重点关注领域。除非另有说明,否则本报告为“ELC”或“我们”)。内容涵盖我们的重点关注领域。除非另有说明,本报告涵盖我们 2022 财年(即 2021 年 7 月 1 日至 2022 年 6 月 30 日)期间的活动,并包括我们拥有(或租赁)和运营的大多数设施的数据。本报告已编制,包括我们拥有(或租赁)和运营的大多数设施的数据。本报告根据全球报告倡议 (GRI) 标准:核心选项编制。本报告符合全球报告倡议 (GRI) 标准:核心选项。本报告还符合气候相关财务披露工作组 (TCFD) 和可持续发展会计准则委员会 (SASB) 提出的建议。GRI、SASB、披露 (TCFD) 和可持续发展会计准则委员会 (SASB)。本报告的 GRI、SASB 和 TCFD 指数可在第 125-135 页找到。和本报告的 TCFD 指数可在 125-135 页找到。
受神经生物学启发的自我监控系统
稿件收到日期为 2019 年 5 月 31 日;修订日期为 2019 年 10 月 30 日和 2020 年 2 月 5 日;接受日期为 2020 年 2 月 26 日。出版日期为 2020 年 4 月 6 日;当前版本的日期为 2020 年 6 月 18 日。Andrea A. Chiba 的工作部分由 Irina Merzlyak Russell 和千叶实验室 (NIMH) 资助 (拨款 R01MH110514-02),部分由 Wiles 实验室资助,部分由学习时间动态中心 (NSF SMA) 资助 (拨款 1041755)。Jeffrey L. Krichmar 的工作部分由国防高级研究计划局 (DARPA) 通过空军研究实验室 (AFRL)(终身学习机器:L2M)资助 (合同 FA8750-18-C-0103),部分由空军科学研究办公室 (AFOSR) 资助 (合同 FA9550-19-1-0306)。(通讯作者:Jeffrey L. Krichmar。)
我们受到启发去强化生活
在我们朝着成为一家材料公司的目标迈进之际,展望未来并思考 2020 年可能发生的事情是明智之举。但首先,让我们快速回顾一下。在过去的两年中,我们进行了有针对性的收购以获取知识和专业技能,并且我们收购了美国四家主要的复合材料技术公司。我们的旅程始于 Fabric Development Inc. 和 Textile Products Inc.。随着对 Advanced Honeycomb Technologies 的收购,我们的能力得到了扩展。最后,通过收购 Axiom Materials,我们在北美创建了一个增长平台,而北美是航空航天工业的增长中心。随着对高温材料的需求增加,氧化物-氧化物陶瓷基复合材料作为高温部件的主流材料选择越来越受到关注。通过收购 Axiom Materials,我们已成为全球合格的耐高温氧化物-氧化物陶瓷基复合材料制造商之一。


认知灵感的反应性机器人的推理
摘要。在自然环境中具有综合性运作的情境意识到的人工药物面临着几个挑战:空间意识,对象效果检测,动态变化和不可预测性。一个关键的挑战是代理商识别和监视与其目标有关的环境要素的能力。我们的研究介绍了一种用于反应性机器人技术的神经符号模块化体系结构。我们的系统结合了在环境和图像处理技术(如光流)上执行对象识别的神经组件,以及符号表示和推理。通过将图像示意性知识整合在本体论结构中,推理系统基于体现认知范式的基础。该本体可用于创建有关感知系统的查询,决定符合的问题,并推断从感知数据中得出的实体功能。推理和图像处理的组合允许代理对正常操作的看法,并发现针对特定相互作用中涉及的对象的一部分的新概念。发现的概念允许机器人自主获取培训数据并只是其符号的感知来识别零件,并通过将搜索重点放在这些相关对象的零件上,从而为更复杂的任务进行计划。我们在模拟世界中演示了我们的方法,在模拟世界中,代理商学会了识别涉及支持关系的对象的一部分。虽然代理商最初没有概念,但通过观察从钩子上悬挂的支持对象的示例,但它学会了认识到建立支持所涉及的部分并能够计划支持关系的建立/破坏。这可以通过系统的方式通过观察来扩展其知识的能力,并说明了将深层推理与动态设置中的反应性机器人技术相结合的潜力。

基于 5×5 VCSEL 阵列的启发计算
摘要 人工神经网络等受大脑启发的计算概念已成为经典冯·诺依曼计算机架构的有前途的替代品。光子神经网络的目标是在光子基底中实现神经元、网络连接和潜在学习。本文,我们报告了通过高质量垂直腔面发射激光器 (VCSEL) 阵列开发快速、节能的光子神经元纳米光子硬件平台。开发的 5 × 5 VCSEL 阵列通过均匀制造结合对激光波长的单独控制提供高光学注入锁定效率。注入锁定对于基于 VCSEL 的光子神经元中信息的可靠处理至关重要,我们通过注入锁定测量和电流诱导光谱微调证明了 VCSEL 阵列的适用性。我们发现我们研究的阵列可以轻松调整到所需的光谱均匀性,因此表明基于我们技术的 VCSEL 阵列可以作为下一代光子神经网络的高能效和超快光子神经元。结合完全并行的光子网络,我们的基板有望实现达到10 GHz 带宽的超快速操作,并且我们表明,基于我们的激光器的单一非线性变换每个 VCSEL 仅消耗约 100 fJ,与其他平台相比,具有很强的竞争力。

生物学启发的材料,过程和系统(...
Topics include, but are not limited to: • fundamental research (e.g., aerodynamics, adhesion, superhydrophobicity and self-cleaning, nano and microfluidics, structural colors, optics, rheology, photonics, locomotion, visual systems) • materials development (e.g., biomaterials, composites, hybrid materials, structural materials, high-strength membranes,超轻型结构,自我修复材料)•设备设计(例如,传感器,多功能设备,微型设备,神经形态设备和系统,光子设备)•应用(例如,机器人技术,建筑,生物医学和药品,药物和药品,海洋用途,通讯和信息,人工效应,人工涂料,人工效果,涂层,人工涂料,人工涂料,人工涂层,均可出现,•资源效率,废物管理和生物益生生物呼吸(例如自主系统,绿色能源,生物降解性,循环经济)

受自然启发的基于挤压的微流体方法......
软材料通过紧密模仿生物体的复杂运动和变形行为,在小型机器人应用中发挥着至关重要的作用。然而,传统的制造方法在制造高度集成的小型软设备方面面临挑战。在这项研究中,利用微流体技术精确控制反应扩散 (RD) 过程,以生成多功能和区室化的钙交联海藻酸盐微纤维。在 RD 条件下,生产出复杂的海藻酸盐纤维,用于磁性软连续机器人应用,具有可定制的功能,例如几何形状(紧凑或中空)、交联程度和磁性纳米粒子的精确定位(在核心内部、围绕纤维或一侧)。这种精细控制允许调整微纤维的刚度和磁响应性。此外,纤维内可化学裂解的区域能够在旋转磁场下分解成更小的机器人单元或卷起结构。这些发现证明了微流体在处理高度集成的小型设备方面的多功能性。