XiaoMi-AI文件搜索系统
World File Search SystemLocalization
内容 - SDG 本地化
临沧位于云南省西南边陲,澜沧江与怒江交界处,与缅甸接壤,是汉、彝、佤、傣等多民族世居之地。临沧市沧源佤族自治县保存有距今3500年前的岩画,生动地记录了先民们努力适应环境、改善生活的过程。岩画反映了临沧的历史,强调了人与环境的相互依存、相互影响。历史上,临沧因自然资源丰富,封闭、交通不便,导致经济社会发展面临诸多困难,是欠发达边境多民族聚居地区的典型代表。

脑电图源定位
脑电图 (EEG) 已广泛用于脑功能研究,目前仍是如此。EEG 相较于其他神经成像方式具有优势。首先,它不仅直接对神经元的电活动进行成像,还具有更高的时间分辨率。此外,当前先进的技术能够从 EEG 数据中进行精确的数学计算和复杂的定位。使用这些先进技术进行 EEG 分析时,应考虑几个重要因素。首先,原始 EEG 数据包含生理或非生理伪影。因此,已经提出并开发了用于检测和去除这些伪影的预处理方法和算法。在分析预处理后的 EEG 时,需要解决正向和逆向问题,并且已经应用了几种提出的模型。为了解决正向问题,EEG 来源的源信息和矩阵参数至关重要。因此,需要一个精确的头部模型。相比之下,根据在有限数量的电极处测量的 EEG 反向计算出的电流源的可能组合是无限的,这指的是逆问题。逆问题可以通过基于解剖学和生理学假设对电流源的产生和传播设置限制来解决。因此,提出了偶极子源模型和分布式源模型等方法。源定位需要考虑许多因素,例如原始EEG数据的预处理、伪影去除、准确的头部模型和正向问题以及逆计算问题。本综述总结了应用于上述EEG源定位过程的方法和考虑因素。它还介绍了EEG源定位在癫痫和其他疾病以及脑功能研究中的应用,并讨论了未来的发展方向。
测量自我中心定位
摘要 个体对直线前进的感知 (即自我中心定位) 可能会在患有获得性脑损伤 (ABI) 的患者中发生转变。利用独特的光学系统,我们设计了一种小型便携式设备,供临床使用。数据来自 14 名视力正常的成年人,年龄从 23 岁到 53 岁不等,以及 10 名年龄从 37 岁到 82 岁不等的获得性脑损伤成年人。组平均值以及个体受试者的平均二维自我中心定位值与使用更大、更复杂的实验室设备建立的规范数据一致。关于 10 名获得性脑损伤成年人的初步数据显示了它的临床诊断和治疗应用。事实证明,这种新设备与文献中描述的较大外壳一样精确、准确、有效和可靠。此外,该设备的紧凑性有助于我们诊所对后天性脑损伤患者进行持续测试。

eeg源本地化
自从发现脑电图(EEG)以来,当人们希望脑电图提供“通向大脑的窗口”时,研究人员和临床医生试图在大脑中定位神经元活性,从而产生与EEG无创测量的头皮电位的头皮电位。1950年代的早期探索使用电场理论来从头皮电位分布中推断出当前偶极子在大脑中的位置和取向,从而触发了巨大的努力,以定量推断这些来源。最初,偶极拟合或偶极性定位是选择的方法,许多研究在实验和临床研究中使用了这种方法,并取得了显着的成功。后来,提出了新方法,该方法试图克服必须先验来解决资源数量的问题;这些方法被称为分离源成像技术。引入和增加的磁共振成像的可用性,使大脑和头部的详细逼真的解剖结合在源定位方法中,已大大提高了这种方法的精度。今天,脑电图(以及磁脑摄影或MEG)的来源定位已达到一致性和精确度,使这些方法可以放置在脑成像技术家族中。他们比其他成像方法具有的特殊优势是它们的高时间分辨率,这使活动的起源可以与大规模脑网络中的传播和信息流进行研究。本章概述了这些方法,并以几个示例说明了这些方法,从而将其重点放在癫痫和术前计划中的脑电图源成像,作为具有明显成熟的临床应用。
谁本地化策略.pdf
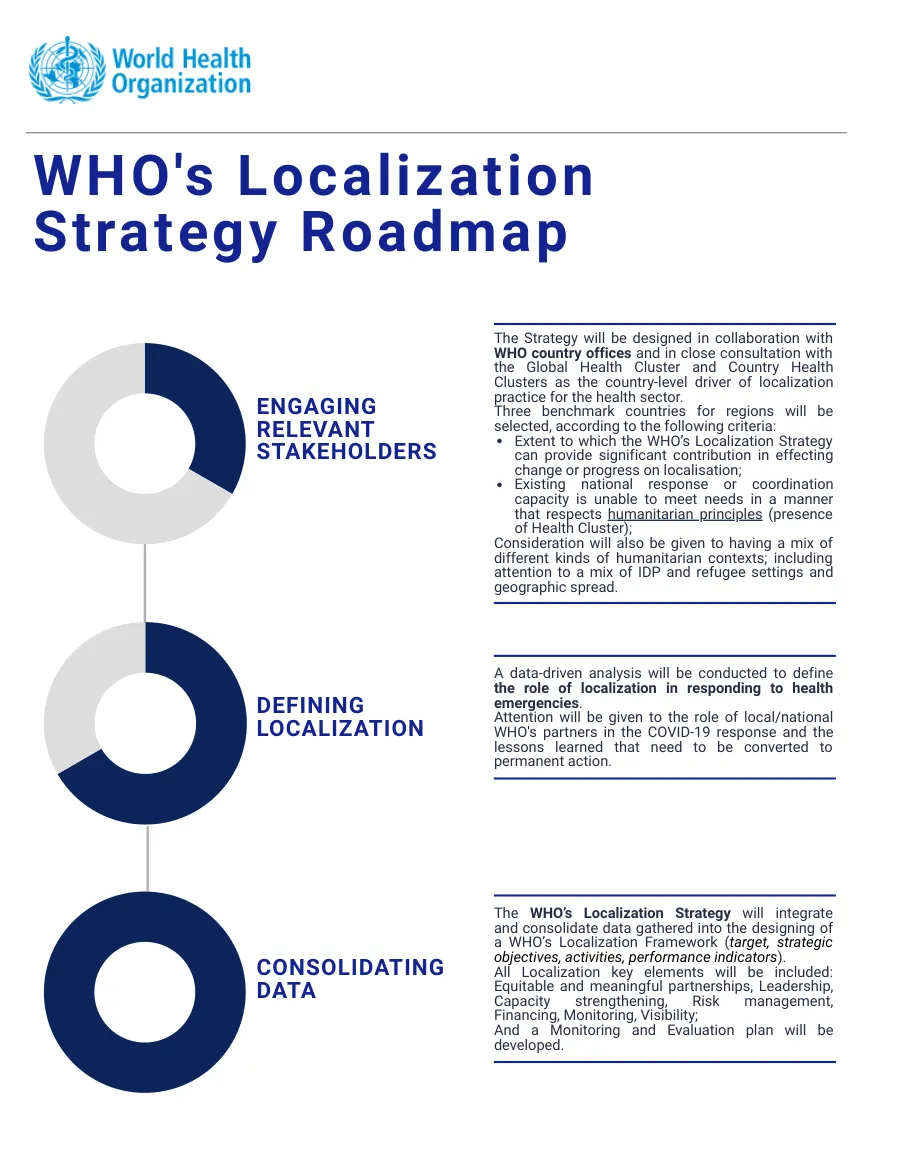
WHO的本地化策略在多大程度上可以在影响变化或对本地化的进展方面做出重大贡献;现有的国家反应或协调能力无法以尊重人道主义原则的方式满足需求(健康集群);还将考虑各种人道主义背景的混合;包括关注IDP和难民环境以及地理扩展的混合。

全息技术、信息定位和子区域
局域性无疑是量子理论和广义相对论不可分割的一部分。另一方面,像 AdS/CFT 这样的全息理论意味着,在边界理论中,体量子引力自由度被编码在空间无穷远处。尽管这种说法是在非微扰层面上的说法,但在量子引力的微扰极限中,这种性质仍然存在。这主要是由于引力高斯定律,它使我们无法定义严格的局部算子。由于在描述中包含引力要求理论在坐标变换下不变,因此物理算子需要是微分同胚不变的。高斯定律实现的这一条件要求算子被修饰到边界,并包含一个延伸到无穷远处的引力版本的威尔逊线,因此要求它们是非局部的。为了解决这一矛盾,我们提出了候选算子,它们可以绕过这一要求,同时在 AdS/CFT 环境中具有局部和微分同胚不变性。这些算子仍然满足引力高斯定律的一个版本,因为它们被解释为相对于状态的特征进行修饰。因此,这些算子所定义的状态是破坏理论对称性并具有“特征”的状态。这些状态通常是具有大方差的高能状态,对应于块体中非平凡的半经典几何。该提议还将有助于解决有关岛屿提议的悖论。此外,这使得人们能够在微扰量子引力中更具体地讨论子区域、其相关子系统和信息局部化。在第二部分中,我们将主要关注称为 AdS-Rindler 楔形的块体子区域。我们将使用从量子信息和量子计算界借用而来的 Petz 映射,从其边界对偶子区域明确地重建该体子区域。这与先前关于体子区域重建的猜想以及由于引力的量子误差校正性质,Petz 映射可用于重建纠缠楔的提议相一致。此外,我们精确研究了 AdS Rindler 楔中的算子代数,包括体和边界对偶。使用交叉积构造和一种新的重正化 Ryu Takayanagi 表面的方法,我们展示了如何通过包括引力校正将代数修改为更易于管理的代数,我们可以在其中定义密度矩阵和冯诺依曼熵。最后,在存在引力相互作用的情况下,我们研究了一般背景下算子代数的一种特殊表示,称为协变表示。这种表示将从物理角度阐明交叉乘积构造的含义。

GHC 本地化策略讲解
全球卫生集群将本地化定义为:“一个协作且动态的过程,旨在使地方和国家参与者(L/NAs)——包括地方公共机构——公平且有意义地参与卫生集群,实现符合人道主义原则的当地主导的卫生响应。”

带混响的深度亚波长定位......
在不进行侵入性近场操作的情况下从远场获取场景的亚波长信息是波工程学中的一个基本挑战。然而,众所周知,波在复杂介质中的停留时间决定了波对扰动的敏感度。现代编码孔径成像仪利用复杂介质提供的自由度 (dof) 作为天然多路复用器,但并未认识到并利用将感兴趣的物体放置在复杂介质外部或内部之间的根本区别。在这里,我们表明,只需用混响被动混沌腔将亚波长物体封闭在其远场中,就可以将定位亚波长物体的精度提高几个数量级。我们认为深度学习是一种合适的抗噪工具,可以提取编码在多路复用测量中的亚波长定位信息,实现远超训练数据中可用的分辨率。我们在微波领域展示了我们的发现:利用简单可编程超表面的配置自由度,我们使用仅强度的单频单像素测量,在混沌腔内沿弯曲轨迹定位亚波长物体,分辨率为 λ = 76。我们的研究结果可能在光声成像以及基于回响弹性波、声音或微波的人机交互方面具有重要应用。

RFID本地化的强化学习
摘要 - 我们目前RL2是一种机器人系统,用于有效,准确的UHF RFID标签。与过去的机器人RFID定位系统(主要集中在位置精度上)相比,RL2学会了如何共同优化定位的准确性和速度。为此,它引入了基于增强学习的轨迹优化网络,该网络学习了机器人安装的读取器天线的下一个最佳轨迹。我们的算法从多个RFID标签中编码孔径长度和位置置信度(使用合成驱动 - 雷达公式)到状态观测值,并使用它们来学习最佳轨迹。我们构建了RL2的端到端原型,其天线在天花板安装的2D机器人轨道上移动。我们评估了RL2,并证明了中位3D定位精度为0.55m,它与基线策略相比,它更快地定位了多个RFID标签2.13倍。我们的结果表明,基于RL的RFID本地化有可能提高跨越制造,零售和物流领域的RFID库存流程的效率。索引术语 - 增强学习,RFID本地化,机器人技术,自主定位,RF传感

本地化: - 范斯坦国际中心
讨论本地化时使用的语言是有争议的。文献中甚至讨论本地化的基本词汇也存在争议,包括“本地化”一词本身和“当地人道主义行为者”一词。用于讨论本地化议程的身份和权力动态的词语(例如“本地”、“国际”、“全球北方”和“全球南方”)并不完美;它们包含的假设并不总是反映身份和地缘政治的复杂性,但它们往往在文献中被广泛使用。其中一些词语将在本文中进行解读和讨论,而有些则不会。对于使用哪些词语存在争议,我们选择了我们认为最能反映最新文献和更广泛的政策话语中使用的术语的语言。作者仍然愿意听取同事的建议和意见。