XiaoMi-AI文件搜索系统
World File Search SystemMultibeam

2。每周报告MSM133 -PARCAT
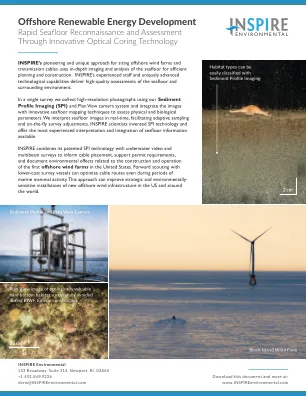
导出通量,提供了有机碳垂直转移的见解。为了进行底栖研究,使用多饲养员检索沉积物核心,以检查表面沉积物的组成和特性。这些核心对于理解有机物在海底的积累和改变至关重要。,我们使用抓手收集了大量的沙质沉积物,以直接测量营养回收利用。使用高级系统(包括声学多普勒电流探险仪(ADCP),Parasound和Multibeam Echosounders)绘制海底地形,评估当前速度和方向,并检测悬浮和沉降的颗粒。
附录I-B调查设备清单
Geophysical survey instruments may include side scan sonar (SSS), multibeam echosounders (MBES), magnetometers/gradiometers, shallow (parametric subbottom) and medium (sparker) penetration single or multi-channel subbottom/seismic profilers, and all support systems (e.g., positioning, motion sensor, compass, sound velocity profiler [SVP]) as以及高分辨率的视觉成像系统(例如,水下摄像头)和被动声监测(PAM)系统。要使用的行业标准调查等级系统包括但不限于以下系统(或同等学历):

Acuson红杉超声系统 - 查看更多。知道...
与常规系统中的多束组重叠,而不是单个或关闭平行光束线。通过Infocus和基于物理的延迟技术启用了次级波束形成。振幅校正可以在发送事件中进行,以显着锐化图像并改善空间分辨率,而不是给定传感器频率的典型分辨率。

河口底栖测绘数据的空间分析与可视化工具与技术
图 1。用于在 GIS 中表示底栖栖息地特征的矢量数据模型示例图 2。用于在 GIS 中表示底栖栖息地特征的栅格数据模型示例图 3。栖息地规模、传感器分辨率、分析/可视化技术与底栖栖息地测绘资金之间的关系图 4。传感器的相对尺度和底栖栖息地测绘分析图 5。多波束测深数据显示数据分辨率对在不同空间尺度上可视化底栖栖息地的影响图 6。底栖栖息地数据的数据显示、数据分析和数据集成之间的差异示例图 7。显示了显示和分析测深数据的不同技术的图表。转换为栅格 (b) 的水深点数据 (a) 可以查询以获取其他数据,例如深度轮廓 (c) 图 8。图示说明从侧扫声纳马赛克中划定地质基质,随后使用更高分辨率的 SPI 样本划定子栖息地 图 9。侧扫和多波束声纳数据的比较显示数据连续性的差异 图 10。Kostylev 等人的底栖栖息地测绘示例。2001 图 11。不同点插值技术的比较 图 12。使用平面视图摄影进行鳗草监测的示例数据收集和分析方法。

第 3 章 深度测定
深度测定 1.简介 深度测定是水文测量员的一项基本任务,需要对介质、水下声学、可用于深度测量的大量设备、用于姿态和升沉测量的互补传感器以及适当的程序有具体的了解,以实现并满足国际推荐的精度和覆盖标准,如 IHO 出版物 S-44 第 5 版所述。铅垂线和测深杆是最早用于直接测量水深的方法。它们的简单操作原理确保了它们在许多世纪中持续使用。源自军用声纳的单波束回声测深仪是一项重大发展,自 20 世纪中期以来一直用于水文测量。在过去十年中,水文测量在深度测量技术和方法方面经历了概念上的转变。多波束回声测深仪 (MBES) 和机载激光测深系统 (ALS) 现在几乎可以覆盖整个海底并进行深度测量。高数据密度和高采集率产生了巨大的测深数据集和大量辅助数据。1998 年,编写第 4 版的 S-44 工作组对深度测量设备的最新技术进行了评估,结果如下:“单波束回声测深仪在浅水中的精度已达到亚分米级。市场上有各种不同频率、脉冲率等的设备。可以满足大多数用户,尤其是水文学家的需求。(…) 多波束回声测深仪技术正在迅速发展,如果使用适当的程序,并且系统的分辨率足以正确检测航行危险,则多波束回声测深仪技术具有进行准确和全面海底搜索的巨大潜力。机载激光测深是一项新技术,可以为浅水清澈水域的调查提供显着的生产力提升。机载激光系统能够测量 50 米或更深的深度。”尽管有这些新技术,但单波束回声测深仪 (SBES) 目前仍然是全球水文调查中使用的传统设备。这些回声测深仪也从模拟记录发展到数字记录,具有更高的精度和准确性,并具有可满足各种目的的特定功能。当需要全海底声波探测时,MBES 已成为深度测定的宝贵工具。数字回声测深仪与运动传感器、卫星定位系统(如 GPS)和数据采集软件的使用相结合,优化了生产效率,并相应减少了测量操作人员。越来越多的国家水文局 (NHO) 采用多波束技术作为收集新海图制作的水深数据的首选方法。
swphc16-07b - 国际水文组织
[ 描述自上次 RHC 会议以来与以下项目相关的调查中发生的任何重大进展 ] a) 新调查的覆盖范围:新调查 Denarau 和 Malolo 岛(新海图 F-10) b) 新技术和/或设备多波束能力(R2sonic 2020 和 2024)和 Norbit 系统 c) 新船舶 RFNS Kacau 和 SMB Ika Vuka d) 遇到的问题有关更新 IHO 出版物 P-5(年鉴)和 C-55(全球水文测量和制图现状)的调查详细信息分别提交于附件 A 和 B。
第 3 章 深度测定
第 3 章 深度测定 1.简介 深度测定是水文测量员的一项基本任务,需要对介质、水下声学、可用于深度测量的大量设备、用于姿态和升沉测量的互补传感器以及适当的程序有具体的了解,以达到并满足国际推荐的精度和覆盖标准,如 IHO 出版物 S-44 第 5 版所述。铅垂线和测深杆是最早用于直接测量水深的方法。它们的简单操作原理确保了它们在许多世纪中持续使用。源自军用声纳的单波束回声测深仪是一项重大发展,自 20 世纪中期以来一直用于水文测量。在过去十年中,水文测量在深度测量技术和方法方面经历了概念上的转变。多波束回声测深仪 (MBES) 和机载激光测深系统 (ALS) 现在几乎可以覆盖整个海底并进行深度测量。高数据密度和高采集率产生了巨大的测深数据集和大量辅助数据。1998 年,编写第 4 版的 S-44 工作组对深度测量设备的最新技术进行了评估,结果如下:“单波束回声测深仪在浅水中的精度已达到亚分米级。市场上有各种不同频率、脉冲率等的设备。可以满足大多数用户,尤其是水文学家的需求。(…) 多波束回声测深仪技术正在迅速发展,如果使用适当的程序,并且系统的分辨率足以正确检测航行危险,则多波束回声测深仪技术具有进行准确和全面海底搜索的巨大潜力。机载激光测深是一项新技术,可以为浅水清澈水域的调查提供显着的生产力提升。机载激光系统能够测量 50 米或更深的深度。”尽管有这些新技术,但单波束回声测深仪 (SBES) 目前仍然是全球水文调查中使用的传统设备。这些回声测深仪也从模拟记录发展到数字记录,具有更高的精度和准确性,并具有可满足各种目的的特定功能。当需要全海底声波探测时,MBES 已成为深度测定的宝贵工具。数字回声测深仪与运动传感器、卫星定位系统(如 GPS)和数据采集软件的使用相结合,优化了生产效率,并相应减少了测量操作人员。越来越多的国家水文局 (NHO) 采用多波束技术作为收集新海图制作的水深数据的首选方法。
LANDMarkTMMarine - Applanix
Applanix POS MV ™ 系统是一种 GNSS 辅助惯性导航系统,可提供一整套位置和方向测量。POS MV 于 1996 年投放全球市场,是一种紧密耦合系统,采用 Applanix 独特的惯性辅助实时运动 (IARTK) 技术。POS MV 具有高数据更新率,可提供完整的六自由度位置和方向解决方案。它设计用于多波束声纳系统,可遵守 IHO(国际水文测量局)标准,在所有动态条件下声纳扫描带宽度大于 ± 75 度。POS MV 为用户提供最高精度的海洋应用运动中测量。