XiaoMi-AI文件搜索系统
World File Search SystemMultibeam
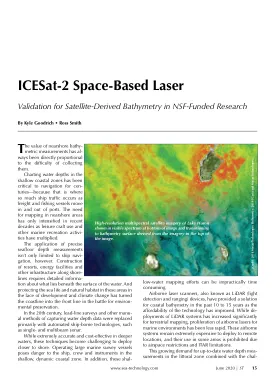
ICESat-2 太空激光器
近岸水深测量的价值始终与采集它们的难度成正比。几个世纪以来,绘制浅水沿岸区域的水深图对航行一直至关重要,因为那里是货船和渔船进出港口等船舶交通繁忙的地方。近几十年来,随着休闲船只的使用和其他海上娱乐活动的增加,近岸区域测绘的需求也愈加强烈。然而,精确的海床深度测量的应用并不仅限于船舶航行。海岸线上度假村、能源设施和其他基础设施的建设需要关于水面下情况的详细信息。面对发展和气候变化,保护这些地区的海洋生物和自然栖息地已经将海岸线变成了环境保护的前线。在 20 世纪,铅线测量和其他获取水深数据的手动方法主要被自动船载技术(如单波束和多波束声纳)所取代。虽然这些技术在较深的水域中非常准确且具有成本效益,但部署在靠近海岸的地方却具有挑战性。在浅水、动态沿海地区操作大型海洋测量船对船舶、船员和仪器构成危险。此外,这些浅水

使用多光谱 WorldView-2 卫星进行深度推导...
摘要尽管最近努力收集整个太平洋岛屿地区的高分辨率多波束测深数据,但在 0-30 米深度范围内仍存在重大差距。实现这些地区的测深覆盖对于评估那里的珊瑚礁生态系统的健康状况至关重要。在这里,我们使用 WorldView-2 多光谱卫星图像和两种深度推导方法(Lyzenga,2006;Stumpf 等人,2003),将光谱辐射值与地面真实深度信息相关联,以推导夏威夷主要岛屿浅水区的深度。与 Stumpf 等人相比,我们的结果表明使用 Lyzenga (2006) 多元线性回归方法的准确性有所提高。(2003) 比率法。此外,我们通过从 Lyzenga (2006) 方法中消除线性化过程获得了更好的结果。这种改进可能与夏威夷主要岛屿内缺乏大型海草聚集有关,因为海草的存在已被证明会影响地面真实深度和光谱辐射值之间的线性关系(Doxani 等人,2012 年)。我们得出的深度产品的准确性与多光谱卫星图像的质量、地面真实数据的可用性和水深直接相关,水深 >20 米时准确性会大幅下降。我们的结果表明,在缺乏浅层(0-20 米)高分辨率测深数据的情况下,卫星得出的深度是研究浅层珊瑚礁生态系统的重要资源。
使用多光谱 WorldView-2 卫星进行深度推导...
摘要尽管最近努力收集整个太平洋岛屿地区的高分辨率多波束测深数据,但在 0-30 米深度范围内仍存在重大差距。实现这些地区的测深覆盖对于评估那里的珊瑚礁生态系统的健康状况至关重要。在这里,我们使用 WorldView-2 多光谱卫星图像和两种深度推导方法(Lyzenga,2006;Stumpf 等人,2003),将光谱辐射值与地面真实深度信息相关联,以推导夏威夷主要岛屿浅水区的深度。与 Stumpf 等人相比,我们的结果表明使用 Lyzenga (2006) 多元线性回归方法的准确性有所提高。(2003) 比率法。此外,我们通过从 Lyzenga (2006) 方法中消除线性化过程获得了更好的结果。这种改进可能与夏威夷主要岛屿内缺乏大型海草聚集有关,因为海草的存在已被证明会影响地面真实深度和光谱辐射值之间的线性关系(Doxani 等人,2012 年)。我们得出的深度产品的准确性与多光谱卫星图像的质量、地面真实数据的可用性和水深直接相关,水深 >20 米时准确性会大幅下降。我们的结果表明,在缺乏浅层(0-20 米)高分辨率测深数据的情况下,卫星得出的深度是研究浅层珊瑚礁生态系统的重要资源。

现代龙骨下间隙管理
本文概述了最近的技术发展,这些技术提高了管理港口龙骨下间隙 (UKC) 的能力。大吃水船舶进入或离开深度受限港口时,如果不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。但是,要做到这一点,他必须拥有沿途准确的实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及特定于船舶的航道动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关洋流、水密度和波浪、涌浪和/或围海冲击的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:现在预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态吃水预测系统;现代水文测量系统(如浅水多波束和侧扫声纳系统);以及现代电子海图系统(及其支持的快速更新服务)。本文讨论了需要对这些系统进行哪些进一步改进才能使有效的 UKC 管理成为现实。
现代龙骨下间隙管理
本文概述了最近改进港口龙骨下净空 (UKC) 管理能力的技术发展。如果大吃水船舶进出深度受限的港口时不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。但是,要做到这一点,船长必须拥有沿航线的准确实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及船舶特定航道的动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关水流、水密度和波浪、涌浪和/或围海的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:即时预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态
现代龙骨下清理管理
本文概述了最近提高港口管理龙骨下净空 (UKC) 能力的技术发展。对于进入或离开深度受限港口的大吃水船舶,如果不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。然而,要做到这一点,他必须拥有沿途准确的实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及船舶特定航道的动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关水流、水密度、波浪、涌浪和/或围海冲击的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:即时预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态吃水预测系统;现代水文测量系统(如浅水多波束和侧扫声纳系统);以及现代电子海图系统(及其支持的快速更新服务)。本文讨论了需要对这些系统进行哪些进一步改进,才能使有效的 UKC 管理成为现实。
现代龙骨下清理管理
本文概述了最近提高港口管理龙骨下净空 (UKC) 能力的技术发展。对于进入或离开深度受限港口的大吃水船舶,如果不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。然而,要做到这一点,他必须拥有沿途准确的实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及船舶特定航道的动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关水流、水密度、波浪、涌浪和/或围海冲击的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:即时预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态吃水预测系统;现代水文测量系统(如浅水多波束和侧扫声纳系统);以及现代电子海图系统(及其支持的快速更新服务)。本文讨论了需要对这些系统进行哪些进一步改进,才能使有效的 UKC 管理成为现实。
现代龙骨下清理管理
本文概述了最近提高港口管理龙骨下净空 (UKC) 能力的技术发展。对于进入或离开深度受限港口的大吃水船舶,如果不能准确确定其 UKC,可能会对安全、经济和环境造成严重影响。船长可以通过以下方式管理其船舶的 UKC:(1) 采取影响船舶动态吃水的行动(例如改变船速)和 (2) 安排其船舶按计划航线航行,以确保当船舶到达控制深度的位置时,有足够的水位供安全通行。然而,要做到这一点,他必须拥有沿途准确的实时和预测环境信息,以及一种经过验证的方法来预测其船舶在各种情况下的运动(以及动态吃水)。至少,这些信息必须包括准确的海图深度和水下危险、水位以及船舶特定航道的动态吃水预测公式(基于船速、静态吃水和水深)。动态吃水计算可能还需要有关水流、水密度、波浪、涌浪和/或围海冲击的信息。最近开发的可以为 UKC 管理提供必要信息的系统包括:即时预报/预报海洋模型系统(超越实时海洋系统的必要步骤);即时 GPS 系统,用于提供准确的船舶运动数据以校准动态吃水预测系统;现代水文测量系统(如浅水多波束和侧扫声纳系统);以及现代电子海图系统(及其支持的快速更新服务)。本文讨论了需要对这些系统进行哪些进一步改进,才能使有效的 UKC 管理成为现实。
激光,光学, - 年度会议
2019年,罗伯特·阿尔法诺(Robert Alfano)获得了SPIE(光学仪器工程师协会)金牌奖,这是该协会授予的最高荣誉。罗伯特·阿尔法诺(Robert Alfano)是一位意大利裔美国人实验物理学家。他是纽约市城市学院和纽约大学研究生院的杰出科学与工程学教授,他还是Ultrafast Spectroscoscopy and Lasers研究所的创始主任(1982)。他是生物医学成像和光谱,超快激光器和光学元件,可调激光器,半导体材料和设备,光学材料,生物物理学,非线性光学和光子学的先驱;他还从事纳米技术和连贯的反向散射工作。他发现白光超脑激光器是光学相干断层扫描的根源,它正在打破眼科,心脏病学和口腔癌检测的障碍(请参阅“与多键OCT的更好分辨率,第28页”),以及其他应用。他发起了现在被称为光学活检的领域。他最近计算得的,他在职业生涯中为CUNY带来了价值6200万美元的资金,平均每年170万美元。他说,他已经通过“撞到人行道”来实现这一壮举。他养成了积极接触资金并使他们对他的工作感兴趣的习惯。alfano除了诸如光学通信,固态物理学和计量学之类的领域外,还发现了进一步生物医学光学的发现。Alfano在生物医学仪器开发方面取得了出色的记录。在700多种研究文章,102份专利,几本编辑的卷和会议记录中,他对光子学的贡献记录在案中,并引用了10,000多个引用。他拥有45份专利,仅在生物医学光学区域发表了230多种文章。他发现白光超脑激光器是光学连贯性层析成像的根源,它正在打破眼科,心脏病学和

非对称毛细管力引导的激光打印微柱手性组装
可控的方式。[6] 然而,自上而下的技术不可扩展,且大多数技术耗时耗力,从而阻碍了它们的潜在应用。特别是手性微结构可以通过调制飞秒激光焦点的单次曝光快速制造。[7] 其几何形状严格由可实现的结构化焦点决定,并且得到的表面质量相当差。相反,自下而上的方法提供了一种经济高效且可扩展的替代方法,通过由不同材料(如共聚物、[8] 肽、[9] 纳米粒子 [10] 和 DNA 四面体 [11] 制成的亚基的顺序自组装来创建分层纳米结构。不幸的是,由于自发自组装过程的固有特点,对几何形状、空间排列、规律性和螺旋性的精确控制非常困难。自上而下和自下而上相结合的混合制造技术的最新进展有望克服上述一些限制。[12] 特别是,通过介导弹性毛细管相互作用的毛细管力驱动自组装引起了人们的极大兴趣,因为它具有简单性和可扩展性的独特优势,[13] 并且在一定程度上已用于混合制造策略。基于光刻的技术已经实现中尺度刷毛的制造,并且通过利用弹性毛细管聚结已经得到高度有序的螺旋簇。[14] 然而,由于圆形原纤维具有旋转对称性,因此单个簇所实现的手性是随机的。虽然可以通过将横截面渲染为矩形来获得特定的手性重排,但手性的可调性仍然有限。利用电子束光刻技术实现10纳米级的纳米柱,然后通过毛细管力诱导的纳米内聚力进行自组装。[15] 利用多光束干涉光刻技术,结合溶液蒸发过程中的毛细管力,制备并组装大面积图案化微柱。[16] 我们之前的研究表明,可以利用毛细管力来驱动直柱生成具有高度可控性的分级微结构。[17] 然而,由于毛细管力在微尺度上很难利用,它们都无法实现可控的手性结构。因此,开发一种简便、可控、高效的功能手性结构制备方法是十分有必要的。