XiaoMi-AI文件搜索系统
World File Search SystemParameter

izhikevich的神经元小网络中的参数和耦合估计
如今,实验技术使科学家可以访问大量数据。为了从生成这些数据的复杂系统中获取可靠的信息,需要适当的分析工具。卡尔曼滤波器是一种经常使用的技术,可以推断出系统的模型,即从不确定观察结果中的模型参数。最近证明,卡尔曼过滤器的无味卡尔曼过滤器(UKF)的实现,能够推断一组耦合混乱振荡器的连通性。在这项工作中,我们测试UKF是否还可以重建一小组耦合神经元的连通性,而它们的链接是电气突触或化学突触。特别是我们认为Izhikevich神经元,并旨在推断哪些神经元相互影响,将模拟的尖峰列车视为UKF使用的实验观察结果。首先,我们验证UKF是否可以恢复单个神经元的参数,即使参数随时间变化。第二,我们分析了小型神经集合,并证明UKF允许推断神经元之间的连通性,即使是为了异构,有指导性和时间发展的网络。我们的结果表明,在这个非线性耦合系统中,可以进行时间有关的参数和耦合估计。

PTPT:通过多物理设计工具参数调整...
摘要 — 在先进的集成电路设计中,与电子设计自动化 (EDA) 工具相关的物理设计流程起着至关重要的作用。大多数情况下,输入物理设计工具的参数主要是基于专家的领域知识手动挑选的。然而,由于技术节点的不断缩小以及参数组合所跨越的设计空间的复杂性,甚至再加上耗时的仿真过程,这种对物理设计工具参数配置的手动探索变得极其费力。在设计流程参数调整领域存在一些工作。然而,非常有限的现有技术探索了多个感兴趣的结果质量 (QoR) 指标(例如延迟、功率和面积)之间的复杂相关性并同时明确优化这些目标。为了克服这些弱点并寻求物理设计工具的有效参数设置,在本文中,我们提出了一个多目标贝叶斯优化 (BO) 框架,以多任务高斯模型作为替代模型。采用基于信息增益的获取函数依次选择工具模拟候选对象,以有效逼近帕累托最优参数配置。在 7 纳米技术节点下的三个工业基准上的实验结果证明了所提出的框架相对于前沿作品的优越性。
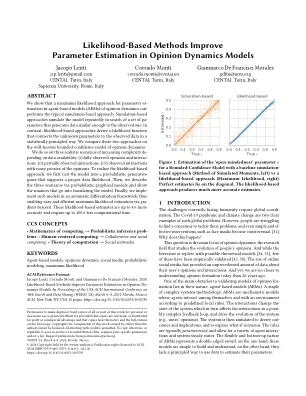
基于可能性的方法改善了意见动力学模型中的参数估计
我们表明,在基于代理的模型(ABMS)中,意见动力学的最大似然方法超出了典型的基于仿真的方法。基于仿真的方法会重复模拟模型,以寻找一组与观察到的数据相似的数据。相比之下,基于似然的方法得出了一种可能性函数,该函数将未知参数与观察到的数据以统计原则的方式连接到了观察到的数据。我们将这两种方法比较了众所周知的意见动力学模型。我们在数据可用性上增加复杂性的三种现实情况:(𝑖)完全观察到的意见和相互作用,(𝑖𝑖)部分观察到的相互作用,(𝑖𝑖𝑖)观察到与观点噪声代表的相互作用。为了实现基于可能性的方法,我们首先将模型投入到支持适当数据可能性的概率生成式的幌子中。然后,我们通过概率图形模型描述了三种情况,并显示了转化模型的细微差别。最后,我们在自动分化框架中实现了此类模型,从而可以通过差异下降来轻松有效地估算最大似然。这些基于可能性的估计值最高4倍,并且最多需要200倍的计算时间。

使用人工磁场和配备机器人激光的手臂进行超级kamiokande pmts表征探测用机器学习武装的顽固性BSM参数空间
这项研究引入了创新的机器学习(ML)辅助采样方法,旨在更有效地扩展标准模型(BSM)参数空间。Markov Chain Monte Carlo(MCMC)和Hamiltonian Monte Carlo(HMC)等传统方法经常在高维,多模式空间中面临限制,从而导致计算瓶颈。我们的方法结合了积极训练的深层网络(DNN)和嵌套采样,动态预测更高的样子区域,以加速收敛并提高采样精度。这些可扩展的框架具有可扩展的框架,可以在高层物理学(HEP)研究中进行全面分析,以解决bsm compariete bsm commiate bsm commiate bsm compariate bsm compariate bsm comporiate comportiation comportiation comportiation。
锂离子电池状态和参数估计的新级联框架
摘要:锂离子电池在线监视由于其内部状态的不可衡量的特征而具有挑战性。到目前为止,电池监视的最有效方法是基于等效电路模型应用高级估计算法。此外,一种估计缓慢变化的不可估计的参数的通常方法是将它们包括在零时间导数条件下,构成所谓的扩展等效电路模型,并已广泛用于电池状态和参数估计。尽管将各种高级估计算法应用于联合估计和双重估计框架,但这些估计框架的本质尚未更改。因此,电池监视结果的改进有限。因此,本文提出了一种新的电池监视结构。首先,由于叠加原则,提取了两个子模型。对于非线性,进行了可观察性分析。表明,局部可观察性的必要条件取决于电池电流,电池容量的初始值以及相对于充电状态的开路电压的衍生物平方。然后,获得的可观察性分析结果成为提出新的监测结构的重要理论支持。选择并使用常用的估计算法,即卡尔曼过滤器,扩展的卡尔曼过滤器和无香的卡尔曼过滤器。使用合成数据的数值研究已证明了所提出的框架的有效性。使用合成数据的数值研究已证明了所提出的框架的有效性。除了提供电池开路电压的同时估算外,电池容量估计更快,更易用的电池容量估计是新提出的监测结构的主要优势。

社区气氛模型6
摘要。本文记录了从扰动的参数集合(PPE)技术的方法和限制性的结果,其中多个参数是同时发生的,并且参数值是通过拉丁超管采样确定的。这是通过社区At-Mosphere模型6(CAM6)进行的,这是社区地球系统模型2版(CESM2)的大气组合。我们将PPE方法应用于CESM2-CAM6,以了解对大气物理学参数的气候敏感性。最初的模拟在Mi-Crophysics,对流,湍流和气溶胶方案中有45个参数,具有263个集合成员。这些大气参数通常是许多气候模型中最不确定的。控制模拟和有针对性的模拟,以了解由于气溶胶和快速气候反馈而引起的Climente强迫。在多维空间映射输入参数中探索了各种模拟器的使用来输出指标。参数对各种模型输出的影响,例如辐射,云和气溶胶特性。ma-Chine学习也用于针对观察探测最佳参数值。我们的发现表明,PPE是用于气候不确定性分析的有价值工具。此外,通过同时改变许多参数,我们发现,参数值的许多不同组合可以产生与观察结果一致的恢复,从而仔细的分析

分析X射线光电子光谱的定量比对参数估计
X射线光电子光谱(XPS)数据的解释依赖于依赖几个参数的测量模型,包括光电衰减长度和X射线光子量。但是,其中一些参数尚不清楚,因为它们没有或无法测量。未知的几何参数可以在多弹性因子(对齐参数)中汇总在一起。此参数表征了令人兴奋的光与样品相互作用的能力。不幸的是,对齐参数的绝对值不能直接测量,部分原因是它取决于测量模型。相反,通常估计实验对准的代理,这与对齐参数密切相关。在此,一种基于原始XPS光谱的对齐参数的绝对值的方法(即未加工的光电子计数),显示样品的几何形状和光电子衰减长度。提出的参数估计方法可以使用简化的测量模型对XPS光谱进行定量分析。所有计算都可以在开放和免费的Julia语言框架预言中执行。为了证明可行性,对对齐参数估计方法进行了首次测试,并在模拟数据上使用已知的采集参数进行测试。然后将该方法应用于实验XPS数据,并显示了估计比对参数与典型使用的对齐代理之间的强相关性。

热管理关键性能参数开发和系统分析
II。 引言电气化飞机热管理系统(TMS)设计已成为最近考虑的几种不同建筑和热管理技术的最新感兴趣的主题[1-3]。 这些飞机使用电力总成产生大部分或全部推进动力,因此它们比传统的燃油燃烧飞机上的电力系统产生的废热量多数。 此外,与喷气发动机推进的燃烧过程相比,热量更难拒绝,其中大部分热量通过废气排出。 对于电气推进,热量通常是由电动机绕组,电源设备,电池电池和其他与涡轮机发动机本质上耦合到自由式空气并不那么内在耦合的组件产生的。 因此,设计可以拒绝这种热量的TM的挑战是一个重大的挑战,而无需通过额外的TMS重量,阻力和功耗否定电气化的好处。 许多先前的研究都大小和建模为电气化飞机TMS,但很少考虑系统的故障模式和组件所需的冗余。 此外,许多研究不会在当前飞机获得飞行的环境中进行TMS的规模或评估性能。 本研究旨在量化体重,II。引言电气化飞机热管理系统(TMS)设计已成为最近考虑的几种不同建筑和热管理技术的最新感兴趣的主题[1-3]。这些飞机使用电力总成产生大部分或全部推进动力,因此它们比传统的燃油燃烧飞机上的电力系统产生的废热量多数。此外,与喷气发动机推进的燃烧过程相比,热量更难拒绝,其中大部分热量通过废气排出。对于电气推进,热量通常是由电动机绕组,电源设备,电池电池和其他与涡轮机发动机本质上耦合到自由式空气并不那么内在耦合的组件产生的。因此,设计可以拒绝这种热量的TM的挑战是一个重大的挑战,而无需通过额外的TMS重量,阻力和功耗否定电气化的好处。许多先前的研究都大小和建模为电气化飞机TMS,但很少考虑系统的故障模式和组件所需的冗余。此外,许多研究不会在当前飞机获得飞行的环境中进行TMS的规模或评估性能。本研究旨在量化体重,

分数阶PNGV电池模型的参数估计方法
在不同类型的电池中,锂离子电池因其性能和安全特性而成为最受欢迎的类型。需要电池管理系统来从这种电池中获得便捷的性能并尽可能延长电池的使用寿命。因此,良好的电池管理系统需要一个准确的电池模型。在本研究中,以代表开路电压变化的新一代汽车合作伙伴 (PNGV) 等效电路电池模型为基础,并基于 PNGV 等效电路电池模型创建分数阶电池模型。创建电池模型后,最重要的主题之一是模型参数的确定。在此阶段,为了简化问题,使用分层方法将测量的电池数据集划分为子层,并通过对每个子层进行分析和数据提取来确定参数,以反映不同的充电状态水平。这种方法有助于获得准确的电池模型,在每个电流脉冲期间,稳态误差小于 5 mV,瞬态误差小于 30 mV。