机构名称:
¥ 1.0
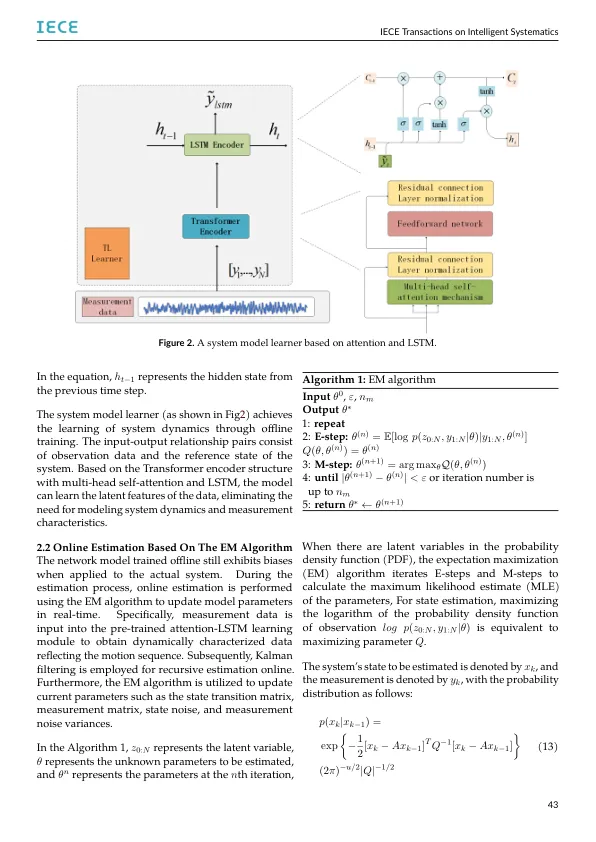
如今,状态估计被广泛用于诸如自动驾驶和无人机导航之类的领域。但是,在实际应用中,很难获得准确的目标运动模型和噪声协方差。这导致传统卡尔曼过滤器的估计准确性降低。为了解决此问题,本文提出了一种基于注意参数学习模块的自适应模型免费状态估计方法。此方法将变形金刚的编码器与长期短期内存网络(LSTM)结合在一起,并通过offline学习测量数据获得了系统的操作特性,而无需对系统动力学和测量特性进行建模。此外,根据注意力学习模块的输出,期望最大化(EM)算法用于估计在线系统模型参数,并使用KalmanFureter来获得状态估计。使用GPS轨迹路径数据集验证了本文,实验结果表明,所提出的参数自适应模型自由状态估计方法的估计精度比其他模型具有更好的估计精度,从而提供了一种使用深度学习网络进行状态估计的有效方法。
参数自适应非模型的状态估计结合了注意机制和LSTM
主要关键词




相关文件推荐