机构名称:
¥ 1.0
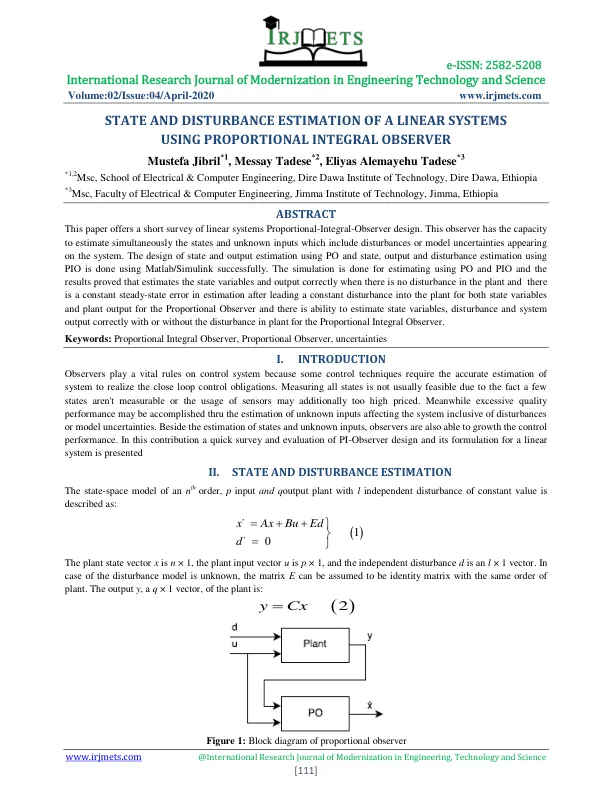
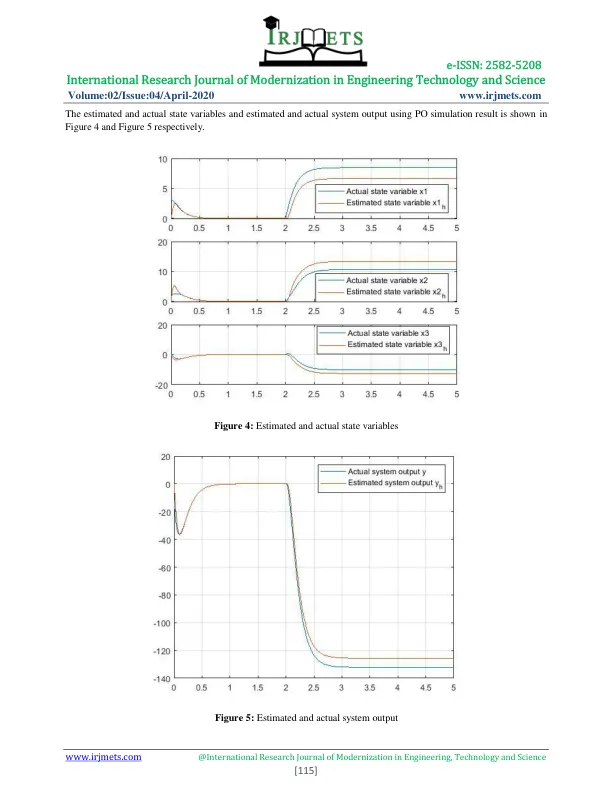
摘要 本文简要介绍了线性系统比例积分观测器的设计。该观测器能够同时估计状态和未知输入,包括系统中出现的扰动或模型不确定性。使用 Matlab/Simulink 成功地完成了使用 PO 进行状态和输出估计以及使用 PIO 进行状态、输出和扰动估计的设计。使用 PO 和 PIO 进行估计的模拟,结果证明,当工厂中没有扰动时,可以正确估计状态变量和输出,而当对比例观测器的状态变量和工厂输出引入恒定扰动后,估计中会出现恒定的稳态误差,并且无论工厂中有无扰动,比例积分观测器都能够正确估计状态变量、扰动和系统输出。
线性系统的状态和扰动估计
主要关键词



相关文件推荐