XiaoMi-AI文件搜索系统
World File Search SystemPneumatic
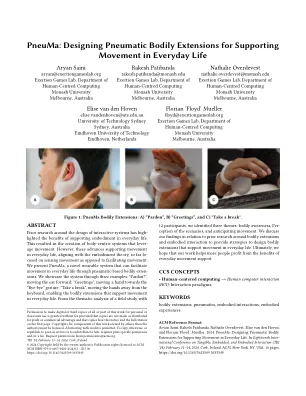
肺气:设计气动身体扩展以支持日常生活中的运动
围绕交互式系统设计的事先研究很大程度上点燃了在日常生活中支持实施例的好处。这导致创建了以身体为中心的系统来杠杆运动。然而,这些进步支持日常生活中的运动,与实施理论保持一致,到目前为止,与促进运动相反,它涉及感应运动。我们提出了一种新型的可穿戴系统,可以通过基于气动的身体延伸来促进日常生活的运动。我们通过三个示例展示了系统:“赦免?”,向前移动耳朵;“问候”,将一只手向“再见”手势;“休息一下”,将手从键盘上移开,从而实现了支持日常生活中运动的身体扩展。
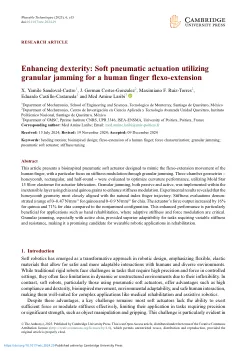
增强灵活性:使用颗粒状的手指弹性伸展
本文介绍了一种生物启发的气动软执行器,旨在模仿人手指的柔韧性运动运动,特别关注通过颗粒状干扰来调节刚度。三腔几何形状 - 蜂窝,矩形和中途 - 以优化曲率性能,利用霉菌星15慢速弹性体进行执行器制造。使用Chia和藜麦晶粒在不可扩展的层中实现了颗粒状干扰,以增强刚度调制。实验结果表明,蜂窝几何形状与天然食指轨迹最紧密地对齐。刚度评估Quinoa的范围为0 - 0.47 N/mm/°,CHIA的范围为0 - 0.9 N/mm/°。与非裁定配置相比,藜麦的执行力量的产量增加了16%,CHIA的力量增加了71%。这种增强的性能对于诸如手部康复等应用特别有益,在这种应用中,自适应刚度和力调节至关重要。颗粒状干扰,尤其是使用Active Chia,为需要可变的刚度和电阻的任务提供了卓越的适应性,使其成为可穿戴机器人应用康复的有前途的候选人。

软韧带混合气动执行器的力分析及其在双足动物机器人机器人中的应用
摘要本文系统地研究了软韧带混合气动执行器(SRHPA),该杂交气动执行器(SRHPA)由一个可固定的可折叠式旋转骨架组成,能够具有大量的螺旋运动和具有高线性驱动力的软蛋卷肌肉。考虑到可折叠骨骼的独特变化螺旋运动,分析模型映射了由波纹管肌肉产生的输入力和执行器的输出力产生的,并通过模拟力分析进行了验证。原型。测试了原型的静态和动态性能,以验证输出力的分析建模。使用执行器作为模块,开发并测试了带有四个模块的新型双足动物机器人,以证明其适应性在构造空间中,通过在转弯,转弯环绕和旋转步态之间进行切换。载板电子设备零的混合执行器和Inch虫机器人有可能在极端的环境中部署,这些环境比电机和驱动器(例如在核和爆炸性环境中)更喜欢气动驱动系统。

软韧带混合气动执行器的力分析及其在双足动物机器人机器人中的应用
摘要本文系统地研究了软韧带混合气动执行器(SRHPA),该杂交气动执行器(SRHPA)由一个可固定的可折叠式旋转骨架组成,能够具有大量的螺旋运动和具有高线性驱动力的软蛋卷肌肉。考虑到可折叠骨骼的独特变化螺旋运动,分析模型映射了由波纹管肌肉产生的输入力和执行器的输出力产生的,并通过模拟力分析进行了验证。原型。测试了原型的静态和动态性能,以验证输出力的分析建模。使用执行器作为模块,开发并测试了带有四个模块的新型双足动物机器人,以证明其适应性在构造空间中,通过在转弯,转弯环绕和旋转步态之间进行切换。载板电子设备零的混合执行器和Inch虫机器人有可能在极端的环境中部署,这些环境比电机和驱动器(例如在核和爆炸性环境中)更喜欢气动驱动系统。
Westgen Technologies:解锁 EPOD 经济型零排气气动仪表空气改造解决方案
• ERA 项目 ID:F0160791 • 项目名称:解锁 EPOD 经济型零排放气动仪表空气改造解决方案 • 收件人联系人姓名和信息:Connor O'Shea • ERA 项目顾问姓名:Aaron Baugh • 项目开始日期:2020 年 7 月 1 日 • 项目完成日期:2023 年 9 月 30 日 • 项目启动时的技术就绪水平 (TRL):6 级 • 项目完成时的 TRL:9 级 • FOR 提交日期:2024 年 2 月 14 日 • ERA 网站的简短项目描述和高水平结果(最多 1000 字):见下文。项目描述:Convrg Innovations(前身为 Westgen Technologies)启动了一项开创性的项目,旨在彻底改变石油和天然气行业的减排。该项目专注于 EPOD 技术的开发和部署,取得了非凡的里程碑,为环境、经济和社会层面做出了贡献。环境影响和温室气体减排:该项目使部署的 12 个机组的二氧化碳排放量显著减少 9,027 吨,为阿尔伯塔省的减排目标做出了显著贡献。展望未来,预测表明到 2032 年排放量将大幅减少。该项目致力于持续创新和可持续实践,使 Convrg Innovations 成为实现长期环境目标的关键参与者。虽然直接影响显而易见,但更广泛的影响延伸到预计的减排数字,与该省雄心勃勃的减排目标保持一致。Convrg 致力于推进减排技术,反映了对环境管理和能源行业可持续未来的承诺。这一减排量加上预期的未来影响,巩固了 Convrg Innovations 在石油和天然气行业引领环保解决方案方面的作用。该项目不仅满足了当前的环境目标,而且还积极为未来几年塑造更绿色、更可持续的能源格局做出贡献。

气溶胶喷射打印过程中气动雾化、气溶胶输送和沉积的计算流体动力学研究
气溶胶喷射打印 (AJP) 是一种直接写入增材制造技术,已成为制造各种电子设备的高分辨率方法。尽管 AJP 在印刷电子行业中具有优势和关键应用,但 AJP 工艺本质上不稳定、复杂,并且容易出现意外的逐渐漂移,这会对印刷电子设备的形态产生不利影响,从而影响其功能性能。因此,对 AJP 进行现场过程监控和控制是不可避免的需求。在这方面,除了对 AJP 过程进行实验表征外,还需要物理模型来解释 AJP 中潜在的空气动力学现象。这项研究工作的目标是建立一个基于物理的计算平台,用于预测气溶胶流动状态,并最终实现对 AJP 过程的物理驱动控制。为了实现这一目标,我们的目标是提出一个三维 (3D) 可压缩、湍流、多相计算流体动力学 (CFD) 模型,以研究 AJP 过程中 (i) 气溶胶生成、(ii) 气溶胶输送和 (iii) 气溶胶在移动自由表面上沉积背后的空气动力学。沉积头以及气动雾化器的复杂几何形状是在 ANSYS - FLUENT 环境中建模的,基于专利设计以及从 3D X 射线微型计算机断层扫描 (l-CT) 成像获得的精确测量。随后使用光滑和软四边形元素的混合对构建的几何形状的整个体积进行网格划分,同时考虑膨胀层以获得靠近壁面的精确解决方案。采用基于密度和压力的 Navier-Stokes 形成的组合方法来获得稳态解,并将守恒不平衡控制在指定的线性化公差以下(即 10 6 )。使用具有可扩展壁面函数的可实现 k-e 粘性模型对湍流进行建模。此外,还建立了耦合的两相流模型来跟踪大量注入的粒子。CFD 模型的边界条件是根据从 AJP 控制系统记录的实验传感器数据定义的。使用因子实验验证了模型的准确性,该实验包括在聚酰亚胺基底上 AJ 沉积银纳米粒子墨水。本研究的结果为实施物理驱动的 AJP 现场监测和控制铺平了道路。[DOI:10.1115/1.4049958]


uthvation pugl prellation_sumb_202-rdppicoxb),nddd> ugion)妈妈
AP Action potential BOLD Blood level-dependent EEG Electroencephalography EM Electrical stimulation of the median nerve ERF Event-related field ERP Event-related potential ET Electrical stimulation of the tibial nerve fMRI Functional magnetic resonance imaging fT Femtotesla Fig Figure GMFP Global mean field power ICA Independent component analysis MEG Magnetoencephalography mm Millimeter ms Millisecond MSR Magnetically shield room PM Pneumatic stimulation of the median nerve PSP Post-synaptic potential PT Pneumatic stimulation of the tibial nerve SD Standard deviation SEF Somatosensory evoked field SEP Somatosensory evoked potential SI Primary somatosensory cortex SII Secondary somatosensory cortex SQUID Superconducting quantum interference devices T Tesla

干燥剂除湿
Applications • Warehouse & Storage Facilities • Document Archives • Military Equipment Preservation • Laboratories and Clean Rooms • Food Processing • Pneumatic Conveying (Product Silos) • Pharmaceutical Manufacturing • Corrosion & Condensation Prevention • Mold & Mildew Prevention • Electronics Storage • Water Treatment Plants • Museums • Film Storage • Grow Facilities