XiaoMi-AI文件搜索系统
World File Search SystemRobotic


M.Tech。嵌入式和机器学习系统
他从牛津大学获得了印度的罗德大学学者的博士学位。他获得了Warangal地区工程学院的学士学位,并获得了最佳即将离开的学生的金牌。他在IIT Bhilai担任访问教授职位,并在悉尼大学,澳大利亚大学和德国麦克斯·普朗克大脑研究所担任访问职位。他曾在英国当选为工程和技术机构以及皇家摄影学会的会员。他获得了IEEE传感器理事会黄金早期职业成就奖和Myril B. Reed最佳纸张奖。他曾担任欧洲IEEE信息和通信技术工作组(ICT)的2019年主席,目前是德国IEEE Circits and Systems Society分会的主席。他的研究兴趣包括CMOS图像传感器,MEM,数码相机和人工智能

机械手
机械手 摘自:SciencetoyMaker.org 如何制作一个工作模型机械手 目标 学生将: • 学习有关机器人技术的基本信息 • 制作一个与人手非常相似的机械手 建议年级 6 至 12 年级 学科领域 机器人技术、技术、工程设计 时间线 60-90 分钟 标准 (NGSS) • MS-ETS1-4 开发一个模型来生成数据,用于迭代测试和修改拟议的对象、工具或流程,从而实现最佳设计 • HS-ETS1-2 将复杂的现实问题分解为可以通过工程解决的更小、更易于管理的问题,从而设计解决方案 21 世纪基本技能 • 创造力和想象力 • 信息素养 • 主动性 • 分析 • 预测模式 背景 机器人是一种能够执行由工程师编程的常规或复杂操作的机器。如今,机器人可用于手术、太空探索、制造和代码分析等方面。人类已经开发机器人和自动机数百年了。自 2000 年代以来,技术的进一步进步带来了更先进的自动化和人工智能。自动化机器被编程为反复执行一个动作,如今已用于制造业、海洋探索、太空探索、军事和商业化农业。由于创新速度快,机器人的未来很难预测。然而,据预测,机器人很可能会在家庭和商业世界中发挥更大的作用。

机器人sapocococopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopex
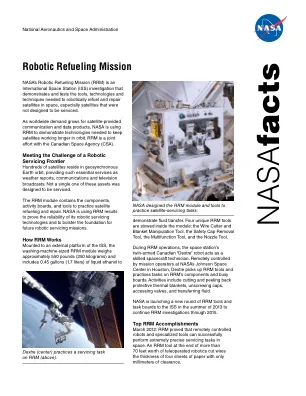
机器人sapocococolecopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopexy是一种用于泌尿生殖器脱垂的手术管理的高级侵入性技术。与传统方法相比,它具有卓越的精度,减少的失血和降低的转化率。但是,较长的手术时间,更高的成本和对专业培训的需求仍然是机器人手术最重要的挑战。与传统方法相比,机器人sapocrococococopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopopexy。但是,描述的是涉及更长的手术时间,成本增加以及对专业培训的需求。此外,该技术显示出减少肥胖患者并改善美容结果的并发症的显着潜力。Comparative studies highlight that robotic and laparoscopic sacrocolpopexy yield similar long-term outcomes, with differences primarily in operative time and cost-ef fi ciency robotics.缺乏标准化协议仍然是一个限制,需要关于耐用性和成本效益分析的长期数据。未来的研究应优先考虑优化结果,降低成本并提高对机器人泌尿瘤手术的可及性。

机器人卫星 HS
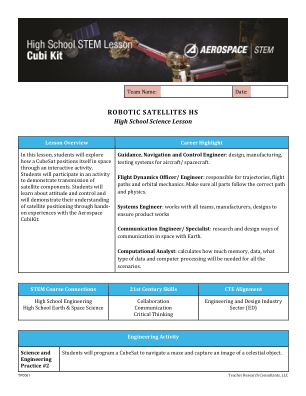
预期集:显示 2017 年 9 月 13 日与 2017 年 11 月 18 日的 NASA Worldview 图像(教师幻灯片第 3 张幻灯片上的 gif)。询问,“当图像从 2017 年 9 月滑动到 2017 年 11 月时,您注意到了什么?”答案各不相同,均可接受。(请注意 9 月份的停电直到 2017 年 11 月中旬才修复)询问,“当图像从 2017 年 9 月滑动到 2017 年 11 月时,您想知道什么?”鼓励提出所有问题/疑问。解释一下这两张卫星图像分别来自 2017 年飓风玛丽亚袭击波多黎各之前和之后,使科学家能够追踪飓风的影响和社区的恢复情况(请注意 9 月份的停电直到 2017 年 11 月才修复)。(有关更多信息,请单击此处。)在接下来的几节课中,我们将探索卫星和立方体卫星在太空中的定位,以了解如何收集数据,例如飓风玛丽亚的图像。接下来的两张幻灯片提供了有关立方体卫星的基础知识,并提到了 CubiKit。A 部分 - Dizzy Bat(25 分钟) 教师注意:学生将参加一个动手体验,在接触学术词汇之前,该体验将模拟方向和态度。当他们了解卫星的 5 个主要组成部分时,这将有助于激活有关体验的先前知识。显示幻灯片 6 以介绍活动。在户外空旷的场地上,学生将参加眩晕蝙蝠活动。教师注意:可以将桌椅移到教室边缘,作为空旷场地的替代方案。
