XiaoMi-AI文件搜索系统
World File Search SystemSynchronization


同步基础知识
6 同步基础 1005 6.1 相位计算和再生 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1010 6.1.2.1 压控晶体振荡器(VCXO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1031 6.5.3 搜索保护期或导频 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..........................................................................................................................................................................................................................1032 6.5.4.3 载波恢复 ....................................................................................................................................................1032. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ... 1036 6.6.2.2 升余弦频率滤波器系列 . . . . . . . . . . . . . . . . . . . . . . . 1039 6.6.2.3 频谱升余弦 (SRC) 频率滤波器系列 . . . . . . . . . . . . . . . . 1042

群居奶牛同步和人工智能
本研究旨在评估影响南非林波波省定时人工授精 (AI) 后群居母牛发情同步反应、受孕和产犊率的因素。从群居村落中选出总共 140 头母牛,依据为:体况评分 (BCS) 为 2 及以上(1-5 级)、未怀孕(不包括小母牛)、产后 90 天、传染性流产 (CA) 阴性。使用 9 天 CIDR ® 方案对选定的母牛进行同步。AI 在同步后 36 和 48 小时使用 Nguni 冷冻解冻精液进行。AI 后 90 天进行妊娠诊断。使用 SAS 的逻辑回归程序分析数据。有反应的母牛占 75%;其中 41% 受孕,36% 产犊。地区、年龄、胎次、体型和品种类型等因素均不会显著影响同步反应和受孕。然而,BCS 显著影响产犊率。体型较小的 Nguni 和 Bonsmara 型母牛在第一次产仔时,BCS ≥3,通过定时人工授精受孕的几率更高。总之,无论 BCS 是否影响产犊,在公共环境中都能实现可接受的发情同步反应、受孕和产犊率。建议在南非有组织的公共生产系统中通过 ART 成功引入优良遗传材料。关键词:辅助生殖技术、Nguni、发情同步、定时人工授精 # 通讯作者:craphalalani@yahoo.com 简介
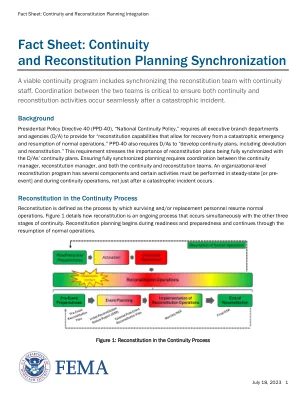
连续性和重建规划同步
总统政策指令 40 (PPD-40),“国家连续性政策”,要求所有行政部门和机构 (D/A) 提供“重建能力,以便从灾难性紧急情况中恢复并恢复正常运营”。PPD-40 还要求 D/A“制定连续性计划,包括权力下放和重建”。这一要求强调了重建计划与 D/A 的连续性计划完全同步的重要性。确保完全同步的计划需要连续性经理、重建经理以及连续性和重建团队之间的协调。组织级重建计划有几个组成部分,某些活动必须在稳定状态 [或事件前] 和连续性操作期间执行,而不仅仅是在灾难性事件发生后。
TC同步和信道编码
– 奥地利空间局 (ASA)/奥地利。 – 比利时科学政策办公室 (BELSPO)/比利时。 – 中央机械制造研究院 (TsNIIMash)/俄罗斯联邦。 – 中国卫星发射和跟踪控制总院、北京跟踪和通信技术研究所 (CLTC/BITTT)/中国。 – 中国科学院 (CAS)/中国。 – 中国空间技术研究院 (CAST)/中国。 – 英联邦科学与工业研究组织 (CSIRO)/澳大利亚。 – 丹麦国家空间中心 (DNSC)/丹麦。 – 航空航天科学和技术部 (DCTA)/巴西。 – 电子和电信研究所 (ETRI)/韩国。 – 欧洲气象卫星应用组织 (EUMETSAT)/欧洲。 – 欧洲通信卫星组织 (EUTELSAT)/欧洲。 – 地理信息和空间技术发展局 (GISTDA)/泰国。 – 希腊国家空间委员会 (HNSC)/希腊。 – 希腊空间局 (HSA)/希腊。 – 印度空间研究组织 (ISRO)/印度。 – 空间研究所 (IKI)/俄罗斯联邦。 – 韩国航空宇宙研究院 (KARI)/韩国。 – 通信部 (MOC)/以色列。 – 穆罕默德·本·拉希德航天中心 (MBRSC)/阿拉伯联合酋长国。 – 国家信息和通信技术研究所 (NICT)/日本。 – 国家海洋和大气管理局 (NOAA)/美国。 – 哈萨克斯坦共和国国家空间局 (NSARK)/哈萨克斯坦。 – 国家空间组织 (NSPO)/中国台北。 – 海军空间技术中心 (NCST)/美国。 – 荷兰空间办公室 (NSO)/荷兰。 – 粒子与核物理研究所 (KFKI)/匈牙利。 – 土耳其科学技术研究理事会 (TUBITAK)/土耳其。 – 南非国家空间局 (SANSA)/南非共和国。 – 空间与高层大气研究委员会 (SUPARCO)/巴基斯坦。 – 瑞典空间公司 (SSC)/瑞典。 – 瑞士空间办公室 (SSO)/瑞士。 – 美国地质调查局 (USGS)/美国。

网络亚微秒时间同步...
摘要 — 本文介绍了一种用于网络连接微控制器边缘设备的 IEEE 1588 精确时间协议 (PTP) 的裸机实现,可在汽车网络和多媒体应用中实现亚微秒级时间同步。该实现利用微控制器 (MCU) 的硬件时间戳功能来实现两级锁相环 (PLL),以校正硬件时钟的偏移和漂移。使用 MCU 平台作为 PTP 主机,可通过网络分发亚微秒级精确的全球定位系统 (GPS) 计时信号。使用主从配置评估系统性能,其中平台与 GPS、嵌入式平台和微控制器主机同步。结果表明,MCU 平台可以通过网络与外部 GPS 参考同步,标准偏差为 40.7 纳秒,从而为各种应用中的裸机微控制器系统实现精确的时间同步。索引术语 —PTP、精确时间协议、微控制器、嵌入式系统、TSN、时间敏感网络
大脑行为量化和同步 (BBQS)
• 推进新方法的工具,用于实时捕获和量化行为的多个维度。 • 推进环境感知(例如物联网 [IoT])和/或改善情境测量与行为测量集成的工具。 • 现有智能硬件技术(例如手机、可穿戴技术)的新应用和/或利用,用于捕获动态行为和/或在同一时间尺度上整合行为和生理测量。 • 不太显眼的无线移动设备(例如无背包),具有长期和高存储容量(例如,内存或功耗允许跨天采样而不是间歇采样),以实现更高的时间分辨率和/或跨时间尺度(例如从毫秒到几天)的使用。
TM同步和通道编码
- 奥地利航天局(ASA)/奥地利。- 比利时科学政策办公室(BELSPO)/比利时。- 机器建筑中央研究所(TSNIIMASH)/俄罗斯联合会。- 北京跟踪与电信技术研究所(CLTC/BITTT)/中国/中国卫星卫星发射和跟踪控制将军/中国。- 中国科学院(CAS)/中国。- 中国太空技术学院(CAST)/中国。- 英联邦科学与工业研究组织(CSIRO)/澳大利亚。- 丹麦国家航天中心(DNSC)/丹麦。- deciênciae tecnologia Aerospacial(DCTA)/巴西。- 电子和电信研究所(ETRI)/韩国。- 欧洲剥削气象卫星(Eumetsat)/欧洲的组织。- 欧洲电信卫星组织(Eutelsat)/欧洲。- 地理信息和太空技术发展局(GISTDA)/泰国。- 希腊国家太空委员会(HNSC)/希腊。- 希腊航天局(HSA)/希腊。- 印度太空研究组织(ISRO)/印度。- 太空研究所(IKI)/俄罗斯联合会。- 韩国航空航天研究所(KARI)/韩国。- 通信部(MOC)/以色列。- 穆罕默德垃圾箱拉希德航天中心(MBRSC)/阿拉伯联合酋长国。- 国家信息与通信技术研究所(NICT)/日本。- 国家海洋与大气管理局(NOAA)/美国。- 哈萨克斯坦共和国国家航天局(NSARK)/哈萨克斯坦。- 国家太空组织(NSPO)/中国台北。- 海军太空技术中心(NCST)/美国。- 荷兰太空办公室(NSO)/荷兰。- 粒子与核物理研究所(KFKI)/匈牙利。- 土耳其科学技术研究委员会(Tubitak)/土耳其。- 南非国家航天局(SANSA)/南非共和国。- 太空和高中气氛研究委员会(Suparco)/巴基斯坦。- 瑞典太空公司(SSC)/瑞典。- 瑞士太空办公室(SSO)/瑞士。- 美国地质调查局(USGS)/美国。

数字无线电接收器中的同步
1.1 背景 ................................................................................................................ 1 1.2 典型的同步方案 ................................................................................................ 3 1.2.1 符号定时恢复 .............................................................................................. 5 1.2.2 载波频率偏移恢复 ...................................................................................... 6 1.2.3 载波相位恢复 ............................................................................................. 6 1.3 使用最大似然法进行同步 ............................................................................. 7 1.4 下限估计 ............................................................................................................. 9 1.5 同步要求及其对接收机 BER 性能的影响 ............................................................. 13 1.6 根据实现方法进行分类 ............................................................................. 22 1.7 FF 和 FB 同步系统之间的等效性 ............................................................. 25 1.8 常用的同步方法 ............................................................................................. 25 1.8.1 蜂窝/PCS 二进制相移键控 (PSK) 系统 ............................................................. 26 1.8.2 频移键控 (FSK) 系统 ...................................................................... 27 1.8.3 最小频移键控 (MSK) 系统 ...................................................................... 27 1.8.4 连续相位调制 (CPM) 系统 ...................................................................... 28 1.8.5 正交频分复用 (OFDM) 系统 ............................................................. 28 1.8.6 码分多址 (CDMA) 系统 ............................................................................. 29 1.9 问题陈述 ...................................................................................................... 32 1.1 0 研究方法 ...................................................................................................... 3 3 1.11 贡献 ............................................................................................................. 34 1.12 论文概述 ............................................................................................................. 35 1.13 结论 ............................................................................................................. 39