XiaoMi-AI文件搜索系统
World File Search SystemWaypoints

基本航空风险标准 - 飞行安全基金会
RPAS 操作员必须有一份记录在案的程序,用于处理每次飞行的执行。该文件应描述飞行的执行情况,包括操作区域、空域考虑、起飞和着陆点、航路点、广播要求、电力/燃料储备等信息,并且必须考虑计划内和计划外的情况,例如动力装置故障、链接/通信/GPS 信号丢失、与入侵飞机或鸟类发生冲突等。操作员应考虑使用书面清单来规划和操作 RPAS 任务。

CheetahNAV 数据表 - 惯性实验室
这款多功能战术导航系统利用实时移动地图技术,持续为驾驶员和机组人员提供准确的态势感知信息。CheetahNAV 具有用户友好的图形导航功能,结合惯性和卫星位置信息,可在预设航点之间准确导航至目的地。CheetahNAV 使用先进的惯性导航系统 (INS),该系统由加速度计和陀螺仪等多种辅助设备组成,使用先进的卡尔曼滤波器算法提供平台的准确位置、速度、航向、俯仰和横滚。
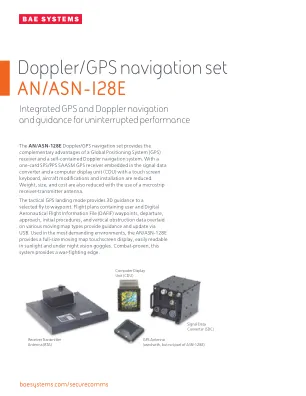
多普勒/GPS 导航装置 AN/ASN-128E - BAE 系统
战术 GPS 着陆模式为选定的飞行航路点提供 3D 引导。飞行计划包含用户和数字航空飞行信息文件 (DAFIF) 航路点、出发、进近、初始程序和垂直障碍物数据,这些数据叠加在各种移动地图类型上,可通过 USB 提供引导和更新。AN/ASN-128E 可在最苛刻的环境中使用,提供全尺寸移动地图触摸屏显示器,在阳光下和夜视镜下也易于阅读。该系统经过实战验证,可提供作战优势。

Lunar Rover与人为潜在的基于现场的启发式的启发式启发式
摘要:将于2030年左右建立的国际月球研究站,将为月球漫游器提供机器人武器作为建筑商。建筑需要月球土壤和月球漫游者,为此,由于短暂的一天,尤其是在南极附近,漫游者必须在有限的时间内遇到不同的航路点,而不会在有限的时间内遇到障碍。传统的计划方法,例如从地面上载指令,几乎无法以高效的效率同时处理许多流浪者。因此,我们提出了一种基于深度强化学习的新的协作路径规划方法,在该方法中,人工电位领域的目标和障碍都证明了启发式方法。的环境是随机生成的,在创建大小障碍和不同的航路点以收集资源,训练深厚的增强学习代理以提出行动,并带领流浪者在没有障碍,完成漫游者的任务并达到不同目标的情况下移动。在每个步骤中,由障碍物和其他流浪者创造的人工潜力领域都会影响流动站的动作选择。人工潜力领域的信息将转变为有助于保持距离和安全性的深度加强学习中的奖励。实验表明,我们的方法可以引导流浪者更安全地移动,而不会变成附近的大障碍或与其他流浪者发生碰撞,并且与具有改进的避免障碍物方法的多代理A-Star路径计划算法相比,消耗的能量更少。

分析细胞 - 细胞连接表型-NSF-PAR
图4。分析未包装图像中细胞 - 细胞连接和细胞形态。(a)355未包装的2D图像。(b)用户沿356边界“ Waypoints”一个单元格时,JANAP确定了单元格。一旦所有单元格都被通路,JANAP就会处理每个单元格。(c)在357个特定感兴趣的单元中,JANAP将沿用户指定的单元边框应用一个过滤器,以消除358个消除背景。(d)沿细胞边界,然后根据所示的359方案对细胞连接进行分类。(e)显示了分类的细胞连接,其表型数据被保存360用于分析。(f)ZO-1的连续,点状和垂直连接的呈现分别为361,用于3D芯片上的芯片设备(3D)和2D PDMS表面(2D)。(g)ZO-1的总计362个连接覆盖率。(H-K)基于ZO-1表达的细胞形状因子。203≤297,其中n 363是从三个生物学重复的细胞数量。364

机器人操纵任务的基于Waypoint的强化学习
摘要 - 机器人武器应该能够学习新任务。这里的一个框架是强化学习,在该学习中,机器人具有编码任务的奖励函数,并且机器人自主学习的动作以最大程度地提高其奖励。现有的强化学习方法通常将此问题构成马尔可夫决策过程,并学习政策(或政策层次结构)以完成任务。这些政策原因是机器人臂需要采取的数百个细粒度的动作:例如,向右移动稍微移动或旋转几个度。但是我们希望机器人执行的操作任务通常可以分解为少数高级运动:例如,到达对象或转动手柄。在本文中,我们提出了一种基于通道的无模型增强学习方法。机器人现在没有学习低级策略,而是学习路点的轨迹,然后使用现有控制器在这些航路点之间进行插值。我们的关键新颖性是将基于Waypoint的设置作为一系列多臂匪徒构建:每个匪徒问题都对应于机器人运动沿线的单路点。从理论上讲,与标准框架相比,对这种重新制定的理想解决方案的遗憾界限较低。我们还引入了一个近似的后固定解决方案,该解决方案一次构建机器人的运动点。跨基准模拟和两个现实世界实验的结果表明,这种提出的方法比最先进的基线更快地学习新任务。请参阅此处:https://youtu.be/mmed-lyfq4y


成功进行员工能力评估的技巧 (...
• 在航点中进行 ECA。在主页上,单击收件箱和任务框中的“查看收件箱”。• 从可用任务列表中选择您分配的 ECA。• 按照说明完成您的 ECA。打印或截屏评分量表可能有助于在进行 ECA 时参考。• 要创建 IDP,请按“推荐操作”过滤 ECA 结果摘要。 • 选择您想要包含在 IDP 中的任何推荐课程,然后单击“创建开发计划”。 • 要进一步修改 IDP,请转到“开发”选项卡下的开发计划。您可以使用此功能构建您的 IDP。• 准备好后将您的 IDP 提交给您的主管。


用于移动目标搜索和跟踪的协作无人机框架
最近,协作式无人机 (UAV) 已用于多种复杂的军事和民用应用中。移动目标搜索 (MTS) 和移动目标跟踪 (MTT) 是需要协作式无人机参与的基于 UAV 的应用之一。因此,本文提出了一种用于 MTS 和 MTT 的协作式无人机框架,称为 (CF-UAVs-MTST)。CF-UAVs-MTST 基于 GzUAV 联合模拟器。它提供了一种 MTS 机制来为 UAV 生成空中航路点。MTS 算法考虑了飞行速度和高度以及机载摄像机的分辨率。MTS 算法可确保有效的覆盖率,约为 96.2%。在执行 MTS 任务时,将运行一种基于级联分类器的算法来检测目标。此外,我们提供了一种 MTT 机制来估计目标运动并设计最佳跟踪路径。仿真结果表明,CF-UAVs-MTST 可以实现快速且高精度的跟踪。