XiaoMi-AI文件搜索系统
World File Search SystemWaypoints

无人机导航的VO -SAF -SAFE强化学习-Orca
摘要 - 这项工作的重点是强化学习(RL)的无人机导航,其本地化基于视觉探测器(VO)。这样的无人机应避免飞向视觉特征差的区域,因为这可能导致定位变化或完全丢失跟踪。为了实现这一目标,我们提出了一个层次控制方案,该方案使用经过RL训练的策略作为高级控制器,以生成下一个控制步骤的航路点和一个低级控制器,以指导无人机到达后续航点。对于高级政策培训,与其他基于RL的导航方法不同,我们通过引入与姿势估计相关的惩罚将对VO绩效的认识纳入我们的政策。为了帮助机器人区分感知友好的区域和不可动摇的区域,我们提供语义场景,作为决策而不是原始图像的输入。此方法还有助于最大程度地减少SIM到真实的应用程序差距。

2021 年全球力量下一个议程
计划截至2月25日 - 时间表可能发生变化0900年3月16日星期二 - 0915年开幕词卡特·卡特·汉姆(Carter F. Carter F. F. F. ham美国陆军退休总统兼首席执行官协会)荣誉约翰·E·惠特利(John E.新的战斗车辆不仅会替代军队中现有的车辆,而且还将提供需要功能,并现代化以超越任何潜在的同伴/靠近同伴对手。一个主要的士兵接触点正在通过移动保护的火力进行,行业正在与可选的载人战车上的开发,并且为机器人战斗车学习的学习运动不断扩大。

多代理海事交通模拟器
此模拟器旨在支持有关海上交通管理的集中式游戏理论算法的研究。它支持任意数量的船舶和土地质量进口。容器被建模为运动的运动,其运动受运动方程式和土地质量为基础,是多个形状的文件。在模拟器中,每艘船都可以使用奖励Oracle,该奖励是通过考虑碰撞和接地的风险,遵守交通规则和运营效率的水平来评估代理商的策略。游戏理论模型预测控制,然后同时为每个流量参与者生成最佳轨迹。船只参与重复的竞争聚机游戏,其平衡解决方案是一系列航路点,旨在由船只交通服务服务作为导航决策支持。我们传达了在Netlogo中实施的代理和功能的建模原理,并介绍了整体模拟器结构和范围。
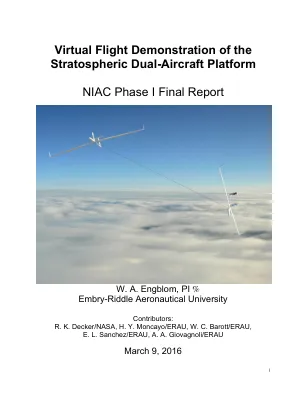
平流层双机平台虚拟飞行演示
在基于物理的飞行动力学模拟中,描述和评估了双飞机平台 (DAP) 概念的基准配置,该模拟用于为期两个月的任务,作为佛罗里达中部低层平流层的通信中继,距离奥兰多市中心 150 英里。DAP 配置具有两个大型滑翔机式(翼展 130 英尺)无人机,它们通过一条可调节的长电缆连接(总可伸缩长度 3000 英尺),可利用可用的风切变有效地航行而无需推进。使用机载 LiDAR 风廓线仪预测风分布被发现是必要的,以使平台能够通过找到平台上足够的风切变来有效调整飞行条件以保持航行。与传统的太阳能飞机一样,该飞机从太阳能电池中获取电力,但当风切变过多时,它还会使用螺旋桨作为涡轮机来获取风能。 60,000 英尺附近长达一个月的大气剖面(间隔 3-5 分钟)来自卡纳维拉尔角 50 Mhz 多普勒雷达风廓线仪测量的存档数据,并用于 DAP 飞行模拟。对这些数据集的粗略评估表明,DAP 航行所需的风切变持续存在,这表明即使受到适度上升/下降率的限制,DAP 也可能航行超过 90% 的长达一个月的持续时间。DAP 的新型制导软件使用非线性约束优化技术来定义航点
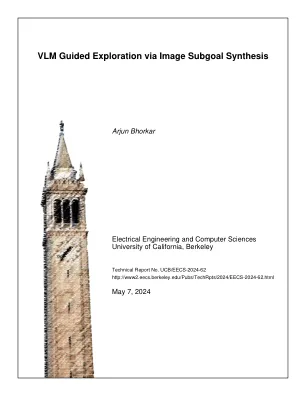
VLM通过图像子缘综合探索
机器人技术中的自主导航传统上依赖于预定的航路点和结构化图,从而限制了动态,真实世界环境中的可扩展性。缺乏通知的语言操作数据集进一步使语言驱动的导航模型的发展变得复杂。受到大规模视觉语言模型(VLM),图像生成模型和基于视觉的机器人控制的最新进展的启发,我们提出了使用VLM引导的图像子缘合成(ELVISS)探索探索的框架,以增强使用用户指示的机器人导航任务的勘探。此框架利用VLMS的语义推理将复杂的任务分解为更简单的任务,并通过生成由低级策略执行的与任务相关的图像子搜索来执行它们。我们还结合了一个基于VLM的子量验证循环,以最大程度地减少执行未生成的子观念。实验结果表明,我们的验证循环显着改善了执行操作与我们的指令的对齐,并且我们的结果系统能够执行基于广义的基于搜索的说明。
22-2255.opinion.8-15-2024_2367929.pdf
Philips North America,LLC(“ Philips”)在加利福尼亚州中部针对Garmin International,Inc。和Garmin Ltd.(Collectifactyly Collectionally of Collectional of U.S. Paptentnos。garminno.e )提起诉讼。 6,013,007(“'007专利”)和8,277,377(“ 377专利”)。 Philips从地方法院提出的部分最终判决中提出了以下判决:(1)关于“ 007专利(索赔建设”之后)的无效索赔,以及(2)对'377专利的主张没有侵权。 出于以后的原因,我们同意地方法院的主张构建“用于计算该GPS薪酬者获得的一系列时间戳记航路点的运动绩效反馈数据”,因此我们确认了地方法院对'007专利的权利要求1和21的不确定确定的确定。 我们还撤消了“ 377专利和还押”权利要求1的判决。Philips North America,LLC(“ Philips”)在加利福尼亚州中部针对Garmin International,Inc。和Garmin Ltd.(Collectifactyly Collectionally of Collectional of U.S. Paptentnos。garminno.e6,013,007(“'007专利”)和8,277,377(“ 377专利”)。Philips从地方法院提出的部分最终判决中提出了以下判决:(1)关于“ 007专利(索赔建设”之后)的无效索赔,以及(2)对'377专利的主张没有侵权。出于以后的原因,我们同意地方法院的主张构建“用于计算该GPS薪酬者获得的一系列时间戳记航路点的运动绩效反馈数据”,因此我们确认了地方法院对'007专利的权利要求1和21的不确定确定的确定。我们还撤消了“ 377专利和还押”权利要求1的判决。

自动功能的扩展...
CS-23 飞机的自动飞行能力通过基于目视飞行规则 (VFR) 的自动机动而得到增强,目前载人飞行也遵循此规则。本文介绍的系统能够使用具有安全监控功能的自动飞行控制系统的现有模块将飞机引导至预定的着陆轨迹。本文开发的有限状态机使用户能够提供高级命令,使自动化系统能够根据 VFR 将飞机引导至选定的预先规划轨迹。进近和复飞机动是使用航路点离线规划的,这些航路点用于引导和控制。在 C2LAND 项目过程中,该系统被集成到飞行系统动力学研究所的自动飞行软件中。使用增量测试计划进行了软件在环 (SiL) 和硬件在环 (HiL) 测试,以确保代码的安全性和稳健性。随后,该系统在研究所的可选驾驶 Diamond DA42 飞机上的广泛飞行测试活动中得到了成功演示。

超越边境:通过从平面图中学习
摘要 - 在本文中,我们应对预测部分观察到的环境的看不见的壁是一组2D线段的挑战,其条件是沿着360°LIDAR传感器的轨迹集成的占用网格。通过在大学校园的一组办公室规模平面图中,通过在一组随机采样的航路点之间导航一组随机采样的航路点,收集了此类占用网格及其相应目标墙细分的数据集。行段预测任务是作为自回归序列预测任务配制的,并且在数据集中对基于注意力的深网进行了训练。基于序列的自动回归公式通过预测的信息增益进行评估,就像在基于边境的自主探索中一样,证明了在文献中发现的非预测性估计和基于卷积的图像预测的显着改善。消融,以及传感器范围和占用网格的度量标准区域。最后,通过在现实世界办公室环境中直接重建的新型平面图中预测墙壁来验证模型通用性。

扩散-PBD:通过扩散特征演示的可推广机器人编程
摘要 - 通过演示编程(PBD)是一种通过演示所需行为来编程机器人操纵技巧的技术技术。但是,大多数现有的方法要么需要广泛的演示,要么无法推广其最初的演示条件。我们介绍了扩散PBD,这是一种新颖的PBD方法,它使用户能够通过利用预先训练的视觉基础模型捕获的表示形式来综合单个演示中的可通用的机器人操纵技能。在演示时间,手和对象检测先验用于从锚定的人类示范中提取路点,以参考场景中的参考点。在执行时,利用了预训练的扩散模型的功能,以确定新观测中的相应参考点。我们通过一系列真实的机器人实验来验证这种方法,表明扩散PBD适用于广泛的操作任务,并且具有强大的能力,可以推广到看不见的对象,摄像头视图和场景。可以在https://diffusion-pbd.github.io

strasa.tech - HAPS平台
2。strasa.tech HAPS平台Strasa.tech HAPS平台设计用于在下层平流层中的操作,它们将其描述为“空域中未充分利用的区域,几乎是商业航空使用的空域的两倍。”这将使HAP的运营高度处于18,288至21,366米(60,000至70,000英尺)的范围内。独特的太阳能平台,带有气体信封安装的太阳能电池板和悬挂在气体信封下的垂直安装的太阳能电池阵列,旨在保持一年的高度。飞行控制系统使用复杂的人工智能(AI)与风校正一起利用平流层风层,在指定的地理位置的附近进行导航和有效维护宽松的站点,或者在过境期间在航路点之间导航。使用平流层风层和放松地位定位要求大大降低了HAPS平台的推进功率要求,而不会过度影响任务表现。HAPS平台将受益于使用非常低的氦气泄漏率的新家庭,Atlas于2022年4月宣布的多层气体信封材料: