机构名称:
¥ 1.0
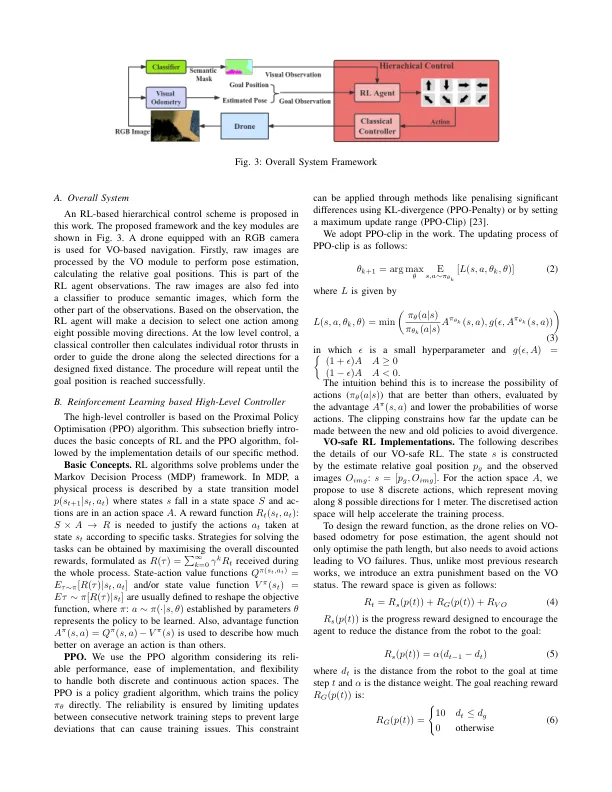
摘要 - 这项工作的重点是强化学习(RL)的无人机导航,其本地化基于视觉探测器(VO)。这样的无人机应避免飞向视觉特征差的区域,因为这可能导致定位变化或完全丢失跟踪。为了实现这一目标,我们提出了一个层次控制方案,该方案使用经过RL训练的策略作为高级控制器,以生成下一个控制步骤的航路点和一个低级控制器,以指导无人机到达后续航点。对于高级政策培训,与其他基于RL的导航方法不同,我们通过引入与姿势估计相关的惩罚将对VO绩效的认识纳入我们的政策。为了帮助机器人区分感知友好的区域和不可动摇的区域,我们提供语义场景,作为决策而不是原始图像的输入。此方法还有助于最大程度地减少SIM到真实的应用程序差距。
无人机导航的VO -SAF -SAFE强化学习-Orca
主要关键词



相关文件推荐