机构名称:
¥ 1.0
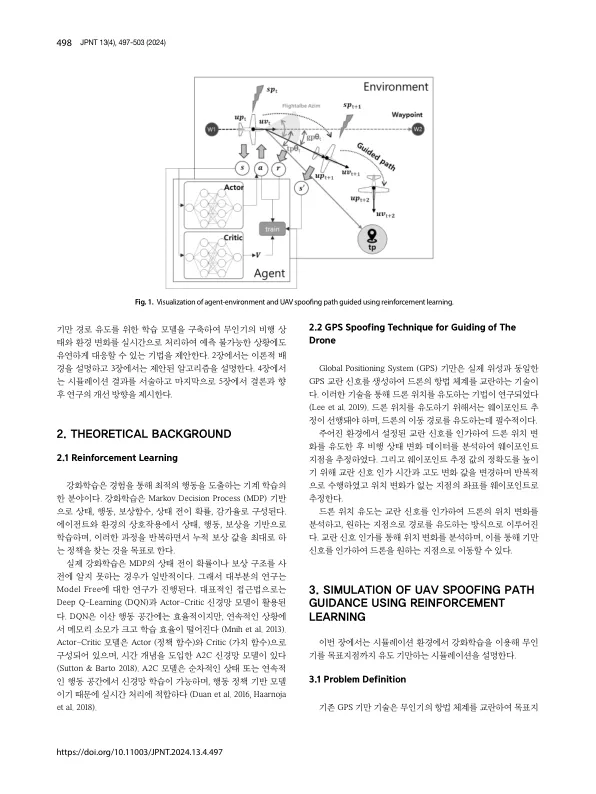
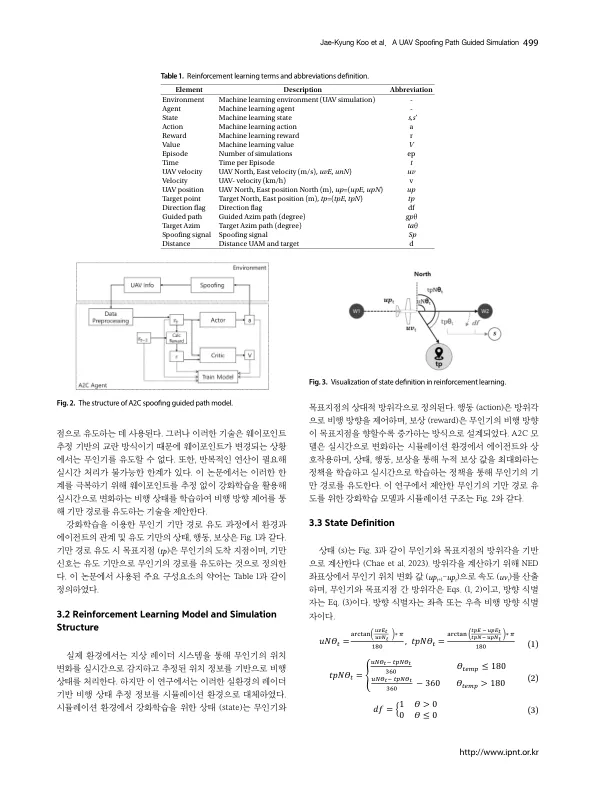
在准备无人驾驶汽车(UAV)进行监视或恐怖主义的情况下,本研究提出了一种使用欺骗信号来指导无人机到达目标点的技术,该信号会干扰全球导航卫星系统(GNSS)。但是,用于欺骗的基于Waypoint估计的方法需要重复计算,从而使实时处理具有挑战性并降低其对目标点变化的响应能力。本文提出了一种使用强化学习的技术,该技术通过动态学习和适应飞行状态的变化而无需估算飞行状态,从而实时指导无人机欺骗路径。为了有效地学习实时飞行状态变更数据,利用了优势行为者(A2C)强化学习模型。在模拟中,开发了通过增强学习实时控制飞行的欺骗路径的模拟。应用了所提出的增强学习模型,并通过模拟实验验证了增强学习模型,在该实验中,更改了引导欺骗的目标点。
使用强化学习无人机...
主要关键词

相关文件推荐