XiaoMi-AI文件搜索系统
World File Search SystemYAW
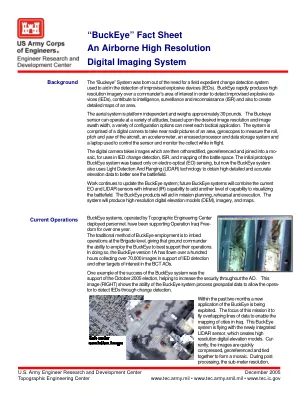
BuckEye 情况说明书 - 机载高分辨率数字成像系统
空中系统独立于平台,重约 30 磅。Buckeye 传感器可以在各种高度下工作,根据所需的图像分辨率和图像幅宽,各种配置选项可以满足每种战术应用。该系统由一台数码相机(用于拍摄某个区域的近地面照片)、陀螺仪(用于测量飞机的滚动、俯仰和偏航)、一个加速度计、一个封闭的处理器和数据存储系统以及一台笔记本电脑(用于控制传感器并在飞行过程中监控收集情况)组成。
基于相位超前补偿器和信号约束控制器的无人机实现及横侧控制优化
无人驾驶航空飞行器 (UAV) 已成为相当多行业和设施的有用实体。它是通信、防御、安全、配送、监视和勘测等领域的一种灵活、经济高效且可靠的解决方案。然而,它们的可靠性取决于嵌入在机身后面的控制系统的弹性和稳定性能。因此,UAV 主要取决于控制器设计和特定性能参数的要求。尽管如此,现代技术总有改进的空间。本研究以类似的方式实施和研究了 UAV 横向控制系统,并使用比例、积分和微分 (PID) 控制器、相位超前补偿器和信号约束控制器对其进行了优化。本研究的意义在于优化现有的 UAV 控制器装置,以提高横向性能和稳定性。有了这种无人机,无人机社区将受益于使用本文所用的优化方法设计稳健的控制,而且这将提供复杂的控制以在不可预测的环境中运行。据观察,使用相位超前补偿器 (PLC) 优化横向控制动力学的结果比简单的 PID 反馈增益更有效。然而,为了优化横向速度、偏航率和偏航角模式的不需要的信号,PLC 与 PID 集成以实现动态稳定性

集成路径以下和分布式驱动器自动驾驶无人车辆的横向稳定性控制
摘要:智能化是未来汽车行业的发展趋势。智能设备要求车辆的动态控制可以根据决策计划的轨迹输出来完成轨迹跟踪,并确保车辆的驾驶安全性和稳定性。但是,紧急情况引起的轨迹限制规划和严格的道路条件将增加轨迹跟踪和无人车辆稳定控制的困难。鉴于上述问题,本文研究了分布式驱动器无人车辆的轨迹跟踪和稳定性控制。本文应用了分层控制框架。首先,在上部控制器中,提出了算法后的自适应预测时间线性二次调节器(APT LQR)路径,以考虑轮胎的动态稳定性性能,以获取所需的前轮驱动角度。DDAUV的横向稳定性是基于相位平面确定的,在改进的滑动模式控制(SMC)中,滑动表面进行进一步调节,以获得所需的额外偏航矩,以协调路径后跟随和横向稳定性。然后,在下部控制器中,考虑到四个轮胎的滑动和工作负载,建立了全面的成本功能,以合理地分配四个轮毂电动机(IWM)的驾驶扭矩,以生成所需的额外偏航矩。最后,建议的控制算法通过硬件(HIL)实验平台验证。结果显示了以下路径,并且在不同的驾驶条件下可以有效地协调横向稳定性。

自主垂直起降技术会议日程表 9Jan25.xlsx
8:00 - 8:30 AM Wenlong Zhang (亚利桑那州立大学) 抗碰撞无人机 - 高逼真度模拟和精确控制研究 8:30 - 9:00 AM Jeffery Lusardi (美国陆军) 陆军垂直升力系统的飞行动力学、控制和自主性 9:00 - 9:30 AM Nate Isbell (SkyGrid) AAM 空域整合的作战概念 9:30 - 10:00 AM 10:00 - 10:30 AM Archit Krishna Kamath (新加坡南洋理工大学) 通过增强 eVTOL 飞机的容错能力和偏航控制

经验 - 弗朗索瓦·贝尼耶
和/或对一架直升机 (AgustaWestland AW139) 和以下固定翼飞机的 Primus EPIC AFCS 进行共模分析 (CMA): - Embraer ERJ170/175/190/195, - Dornier Do728(已停产), - Gulfstream G500、G550, - Dassault Falcon F900EX EASy、F2000 EASy、F7X, - Raytheon Hawker 4000 Horizon, - Cessna Citation Sovereign。AFCS 高度集成,通常提供以下功能:自动驾驶仪、飞行指引仪、偏航阻尼器、失速警告和失速保护、自动油门、俯仰自动配平和马赫配平。
研发项目评估方法概述
本手册向管理人员介绍了评估研究与开发 (R&D) 项目的各种方法,由美国新墨西哥州阿尔伯克基的桑迪亚国家实验室根据合同 DE-AC04 94AL8500 为美国能源部 (DOE) 编写。桑迪亚由桑迪亚公司运营,该公司是洛克希德马丁公司的子公司。美国能源部能源效率与可再生能源办公室 (EERE)、规划、预算与分析办公室 (OPBA) 的 Jeff Dowd 指导了这项工作。TIA Consulting, Inc. 的 Rosalie Ruegg 是主要作者,桑迪亚国家实验室的 Gretchen Jordan 协助她完成了这项工作。太平洋西北国家实验室的 Joe Roop 贡献了有关跟踪技术商业化的部分。EERE OPBA 还感谢 EERE 首席技术官 Sam Baldwin 在编写本手册过程中提供的指导。 OPBA 还感谢 TMS Inc. 的 Yaw Agyeman 对小册子的审阅以及在准备出版过程中提供的帮助。
Windscape AI 概述
• Windscape.ai 将提前 15-60 秒发出风向变化和阵风警报,从而提高风力发电场的发电量和涡轮机的使用寿命。• 我们使用 AI 模式识别来识别明显的大气信号。• 风力发电场通过优化俯仰和偏航设置来提高发电量。• 叶片在阵风前羽化,齿轮箱和叶片损坏减少。• 风力发电场投资回报率提高。• AI 使用已知技术。• 硬件成本极低、坚固耐用、现成可用。• 已获得专利。• 概念验证已完成。• 价值 1 亿美元的美国市场。全球价值 6 亿美元。

电子宣传册_编辑 - Dodson International
双电动配平系统 新型驾驶舱面板、仪器、顶置面板和仪表 Century 偏航阻尼器 新型 Kaydex 鳃衬 伞兵流线型门改造 改进的门抛弃系统 标准双货舱门(70 英寸高 x 84 英寸宽) 货舱(420 英寸长 x 78 英寸宽) 钢制货舱地板 横跨天花板、侧面和地板的道格拉斯系紧轨道 货物绞盘电源装置 热道具 自动羽化系统 道具同步系统 道具防冰系统
CONEXUS® 飞机通信装置型号 200
ACU-200 利用多种无线连接功能,包括:Cat 4 LTE 蜂窝、3G GSM 蜂窝、2G 蜂窝和 433 MHz。这些系统可以直接从 ARINC 429 数据总线接收数据,并使用以太网与航空电子或机外系统进行双向通信。ACU 的机载 IMU 和 GPS 还可以生成有关飞机运动的信息,包括姿态(滚转、俯仰、偏航)、旋转速率、加速度、航向、速度和位置(纬度、经度、高度),从而简化了传统飞机上的一些数据采集挑战。
CONEXUS® 飞机通信装置型号 200
ACU-200 利用多种无线连接功能,包括:Cat 4 LTE 蜂窝、3G GSM 蜂窝、2G 蜂窝和 433 MHz。这些系统可以直接从 ARINC 429 数据总线接收数据,并使用以太网与航空电子或机外系统进行双向通信。ACU 的机载 IMU 和 GPS 还可以生成有关飞机运动的信息,包括姿态(滚转、俯仰、偏航)、旋转速率、加速度、航向、速度和位置(纬度、经度、高度),从而简化了传统飞机上的一些数据采集挑战。