XiaoMi-AI文件搜索系统
World File Search Systemcommands

附录一个数据模板
计划-QA我们通过零射方法评估了Llama2-13b [4]的功能,并发现其广泛的培训数据为交通规则理解提供了坚实的基础。然而,其有限的数学实力在抓住和推论内结构和数值表达之间的连接方面构成了挑战。为了解决这个问题,我们介绍了一个基于语言的QA数据集,旨在将LLM从通用模型转换为熟练于自主驾驶计划的专业模型。这种增强的重点是完善其在教学解释和推理中的能力。Concretely, we delineated the level of autonomous driving planning into three granularities: 1) high-level instructions: formulated through velocity commands including stop , accelerate , decelerate , maintain speed , and routing commands including turn left , turn right , go straight , 2) control: assessing the values of ve- locity and acceleration, 3) and waypoint: encompassing a series of points.设计了六种问题类型是为了阐明高级指令(控制 - 航路点频谱)之间的过渡关系,并根据NUPLAN [1]的日志数据对每个QA -PAIR进行调整。图s1a说明了通用系统提示模板适用于所有问题,而图s1b-s1g在系统提示中替换每个问题类型的特定示例,并在其各自的答案中替换<问题>和。
野战炮兵炮台 - 陆军出版局
第 7 章 射击命令 ................................................................................................................ 7-1 传输射击命令的方式 ................................................................................................ 7-1 射击命令的要素 ........................................................................................................ 7-1 射击命令的顺序 ........................................................................................................ 7-5 直接射击的射击命令 ................................................................................................ 7-6 特殊射击方法 ............................................................................................................. 7-6 检查射击 ...................................................................................................................... 7-7 停止装弹 ...................................................................................................................... 7-7 任务结束 ...................................................................................................................... 7-7 计划目标 ...................................................................................................................... 7-7 射击命令的重复和更正 ................................................................................................ 7-7 射击报告 ...................................................................................................................... 7-7 射击任务记录 ................................................................................................................ 7-8
osmopysim -usermanual- / < / div>的索引
1简介1 1.1 pysim-shell。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。1 1.1.1视频演示。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2 1.1.2运行Pysim-shell。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2 1.1.3用法示例。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4 1.1.4高级主题。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。10 1.1.5 CMD2基础知识。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12 1.1.6 pysim命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12 1.1.7 ISO7816命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17 1.1.8 TS 102 221命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。21 1.1.9线性固定EF命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。23 1.1.10透明的EF命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。25 1.1.11 ber-tlv ef命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。27 1.1.12 USIM命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。28 1.1.13特定文件命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。29 1.1.14 UICC管理命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。30 1.1.15 ARA-M命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。33 1.1.16 GlobalPlatform命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。35 1.1.17 EUICC ISD-R命令。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。40 1.1.18 CMD2可设置参数。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。47 1.2 Pysim-trace。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 48 1.2.1演示。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。47 1.2 Pysim-trace。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。48 1.2.1演示。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。48 1.2.2运行Pysim-Trace。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 48 1.2.3 Pysim-Trace命令行参考。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 48 1.2.4约束。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。48 1.2.2运行Pysim-Trace。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。48 1.2.3 Pysim-Trace命令行参考。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 48 1.2.4约束。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。48 1.2.3 Pysim-Trace命令行参考。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。48 1.2.4约束。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>48 1.3旧工具。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>49 1.3.1 Pysim-Prog。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>49 1.3.2。 Pysim-Reads。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。。。。。。。。。。52 1.4 Pysim库。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。54 1.4.1 PYSIM文件系统抽象。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 54 1.4.2 Pysim命令摘要。 。 。 。 。54 1.4.1 PYSIM文件系统抽象。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。54 1.4.2 Pysim命令摘要。 。 。 。 。54 1.4.2 Pysim命令摘要。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。65 1.4.3 Pysim运输。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 71 1.4.4 PYSIM实用程序功能。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 75 1.4.5 PYSIM例外。 。 。 。 。 。 。 。 。65 1.4.3 Pysim运输。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。71 1.4.4 PYSIM实用程序功能。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。75 1.4.5 PYSIM例外。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>78 1.4.6 Pysim Card_handler。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 79 1.4.7 Pysim Card_key_provisbid。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 79 1.5 OSMO-SMDPP。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div>78 1.4.6 Pysim Card_handler。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>79 1.4.7 Pysim Card_key_provisbid。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 79 1.5 OSMO-SMDPP。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div>79 1.4.7 Pysim Card_key_provisbid。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>79 1.5 OSMO-SMDPP。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>81 1.5.1运行OSMO-SMDPP。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>81 1.6 SIM-REST服务器。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>83 1.6.1 REST API调用。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>83 div>
M4300 Intelligent Edge 系列全网管可堆叠交换机、M4300 系列交换机、M4300-96X 模块化交换机、命令行 (CLI) 参考手册、软件版本或发行版 12.0.15
配置交换机管理 CPU.......................................................................................................................................................................................................54 CPU 队列命令.....................................................................................................................................................................................................................................................................57 管理接口命令.....................................................................................................................................................................................................................................................................58 IPv6 管理命令..................................................................................................................................................................59 . . . . . . . . . . . . . . . 65 控制台端口访问命令 . . . . . . . . . . . . . . . . . . . . . .70 Telnet 命令 . . . . . . . . . . . . . . . . . . . . . . . .72 安全 Shell 命令 . . ...
![FY24 日历 [CAO 2023 年 8 月 24 日]](/simg/8\8df79d7cb41db923354e7e2f80c4e7fc35cb291b.png)
FY24 日历 [CAO 2023 年 8 月 24 日]
有关 MTT 的更多信息,请致电 DSN 492-0294 或 (757) 492-0295 MTT 的优先级为:作战司令部 (CCMD)、主要统一司令部和联合特遣部队 (JTF) 总部合格司令部
Microsoft Word - VoiceRobotControlTechRep_v15 _Formatted_1.doc
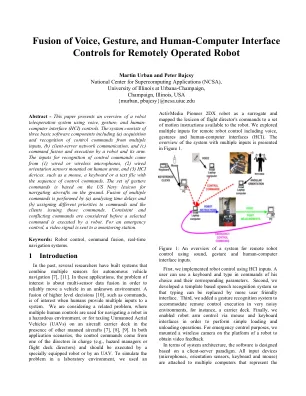
摘要 - 本文概述了使用语音、手势和人机界面 (HCI) 控制的机器人遥控系统。该系统由三个基本软件组件组成,包括 (a) 从多个输入获取和识别控制命令、(b) 客户端-服务器网络通信和 (c) 机器人及其手臂的命令融合和执行。控制命令识别的输入来自 (1) 有线或无线麦克风、(2) 安装在人臂上的有线方向传感器和 (3) HCI 设备,例如鼠标、键盘或带有控制命令序列的文本文件。手势命令集基于美国海军用于在地面导航飞机的词典。多个命令的融合通过 (a) 分析时间延迟和 (b) 为命令和发出这些命令的客户端分配不同的优先级来执行。在机器人执行选定命令之前,会考虑一致和冲突的命令。对于紧急控制,视频信号会发送到监控站。

起草和设计技术,AAS
Upon successfully completing this program, students will be able to: • Analyze and translate problems by presenting them visually. • Develop the ability to execute quantitative design of machines and products. • Identify the basic components of a CADD system. • Perform an infinite number of 2-D design math computations necessary to produce drafting design. • Implementthebasiccommandsnecessarytooperate2-D CADD and 3-D solid modeling systems. • Apply concepts from物理,工程,力学,数学和制图,并将其应用于耐用的机械机器和产品的合成。•沟通有效,有效,适当地记录和报告对工作的重要信息。

combilock pro
使用编程命令,确认条目(Star)编程模式,并在进入有效ID和代码*后命令,锁每秒输入一个10秒的窗口,每秒由绿灯指示。在此窗口中,可以打开锁,可以执行编程命令。此窗口,称为编程模式仅适用于主和用户。在编程模式下,任何不是命令的密钥按下都会导致12个带有连续红光的哔哔声。编程模式的末尾由带有绿灯的低高哔哔声表示。*在打开窗口期间,如果时间延迟处于活动状态,或者在进入2 nd有效ID和代码之后,如果双重模式处于活动状态。用户权限和命令这些指令涵盖了列出的基本操作命令。每个锁提供一个副本。高级操作命令可在单独的说明中获得:高级用户可从我们的网站下载。
AT/ADT/IADT 预备役人员旅行索赔结算 SOP
CPPA 快速链接 第 1 页,共 3 页 系统和服务台 POC https://www.mynavyhr.navy.mil/Support-Services/MyNavy-Career-Center/System- Access/ BUMED 说明 https://www.med.navy.mil/Directives/Instructions/ BUPERS 说明 https://www.mynavyhr.navy.mil/References/BUPERS-Instructions/ CPPA 资源 https://www.mynavyhr.navy.mil/Support-Services/MyNavy-Career-Center/Pers- Pay-Support/CPPA-Resources/ DJMS https://www.milsuite.mil/book/groups/navy-djms-procedures-training-guide DOD FMR https://comptroller.defense.gov/FMR/ DOD 说明 / 指令 / 表格https://www.esd.whs.mil/Directives/issuances/dodi/ DON 备忘录 dtd 2020 年 6 月 30 日 https://www.mynavyhr.navy.mil/About-MyNavy-HR/Commands/Navy-Personnel- Command/Organization/BUPERS/FIAR/ DON 网站 https://www.doncio.navy.mil/ DS-11 https://travel.state.gov/content/travel/en/passports/how-apply/forms.html JAG 说明 https://www.jag.navy.mil/library/ JTR https://www.travel.dod.mil/Policy-Regulations/Joint-Travel-Regulations/