机构名称:
¥ 1.0
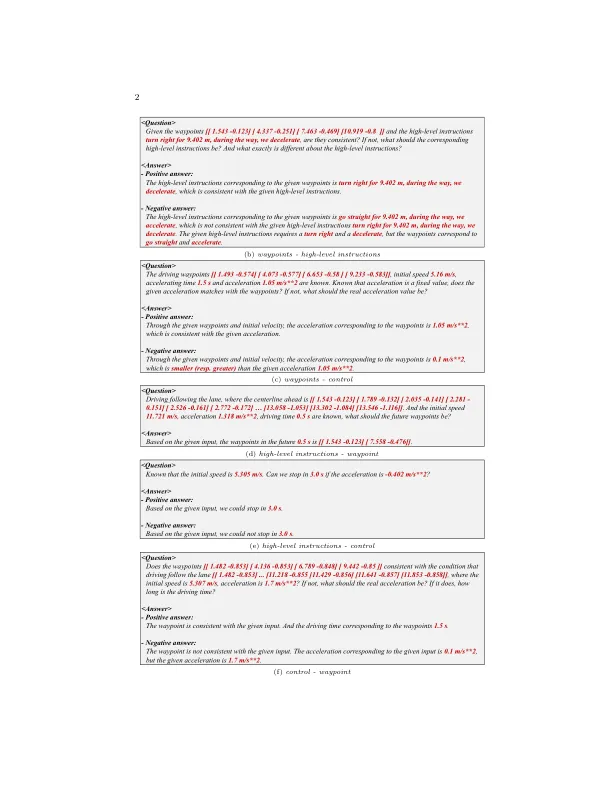
计划-QA我们通过零射方法评估了Llama2-13b [4]的功能,并发现其广泛的培训数据为交通规则理解提供了坚实的基础。然而,其有限的数学实力在抓住和推论内结构和数值表达之间的连接方面构成了挑战。为了解决这个问题,我们介绍了一个基于语言的QA数据集,旨在将LLM从通用模型转换为熟练于自主驾驶计划的专业模型。这种增强的重点是完善其在教学解释和推理中的能力。Concretely, we delineated the level of autonomous driving planning into three granularities: 1) high-level instructions: formulated through velocity commands including stop , accelerate , decelerate , maintain speed , and routing commands including turn left , turn right , go straight , 2) control: assessing the values of ve- locity and acceleration, 3) and waypoint: encompassing a series of points.设计了六种问题类型是为了阐明高级指令(控制 - 航路点频谱)之间的过渡关系,并根据NUPLAN [1]的日志数据对每个QA -PAIR进行调整。图s1a说明了通用系统提示模板适用于所有问题,而图s1b-s1g在系统提示中替换每个问题类型的特定示例,并在其各自的答案中替换<问题>和。
附录一个数据模板
主要关键词

相关文件推荐