XiaoMi-AI文件搜索系统
World File Search SystemiD

参考ID:4985981 -AccessData.fda.gov
完整的处方信息:目录*1。指示和用法1.1。治疗人类天花病1.2。使用的限制2。剂量和管理2.1。重要的给药指令2.2。在启动前和用TPOXX注射2.3治疗之前进行测试。TPOXX口服剂量至少为13 kg和成人2.4。肾功能不全2.5。静脉输注的TPOXX注射剂量和给药3。剂型和优势4。禁忌症5。警告和预防措施5.1。低血糖与雷氏5.2共同管理时。肾脏功能不全和小儿患者患者的羟丙基-β-环糊精摄取的风险<2岁。不良反应6.1。临床试验经验7。药物相互作用7.1。TPOXX对其他药物7.2的影响。 建立的药物相互作用7.3。 药物与TPOXX没有临床显着相互作用的药物TPOXX对其他药物7.2的影响。建立的药物相互作用7.3。药物与TPOXX没有临床显着相互作用的药物
参考编号:4998594 - accessdata.fda.gov
完整处方信息:目录* 1 适应症和用法 2 剂量和给药 2.1 重要安全说明 2.2 推荐剂量 2.3 术前用药和伴随用药 2.4 不良反应的剂量调整 2.5 准备和给药 2.6 辐射剂量测定 3 剂型和强度 4 禁忌症 5 警告和注意事项 5.1 辐射暴露风险 5.2 骨髓抑制 5.3 继发性骨髓增生异常综合征和白血病 5.4 肾毒性 5.5 肝毒性 5.6 超敏反应 5.7 神经内分泌激素危象 5.8 胚胎-胎儿毒性 5.9 不孕风险 6 不良反应 6.1 临床试验经验 6.2 上市后经验 7 药物相互作用 7.1 生长抑素类似物 7.2 皮质类固醇 8 特定人群的使用

Hony Medical Co.,Ltd. Boyle Wang总经理...
•可能导致住院或死亡的严重细菌,真菌,病毒和机会性感染的风险增加。如果发生严重感染直到控制感染,则用Leqselvi中断治疗。治疗前后的潜在结核测试;使用前治疗潜在结核。在治疗过程中监测所有患者的活性结核病患者,甚至具有初始阴性的潜在结核病测试的患者。(5.1)•全因死亡率较高,包括突然的心血管死亡,另一种Janus激酶抑制剂(JAK)与类风湿关节炎(RA)患者中的TNF阻滞剂。Leqselvi未批准用于RA患者。(5.2)•在用Leqselvi治疗的患者中发生了恶性肿瘤。在RA患者中,与另一种JAK抑制剂与TNF阻滞剂的淋巴瘤和肺癌发生率更高。(5.3)•在类风湿关节炎(RA)患者中,另一种Janus激酶抑制剂(JAK)与TNF阻滞剂的较高的MACE(定义为心血管死亡,心肌梗死和中风)。(5.4)•通过Leqselvi治疗的患者发生了血栓形成。增加了另一种JAK抑制剂与TNF阻滞剂的肺栓塞,静脉和动脉血栓形成的发生率增加。(5.5)__________________指示和使用_________________ leqselvi是一种Janus激酶(JAK)抑制剂,该抑制剂用于治疗患有严重脱发Areata的成年人。(1)使用的局限性:不建议将LEQSELVI与其他JAK抑制剂,生物免疫调节剂,环孢菌素或其他有效的免疫抑制剂结合使用。(1)_______________剂量和管理______________

neffy®(肾上腺素鼻喷雾)第1页 - accessData.fda.gov
Wernicke的脑病是由硫胺素(维生素B1)缺乏引起的神经系统紧急事件。Wernicke脑病的体征和症状可能包括共济失调,心理状况变化和眼科治疗(例如,Nystagmus,Coveropia)。任何心理状况,混乱或记忆力障碍的任何变化都应引起人们对潜在脑病(包括Wernicke's)的关注,并迅速进行全面评估,包括神经系统检查,硫胺素水平的评估和成像。在开始无线电前的所有患者中评估硫胺素水平。不要在硫胺素缺乏症的患者中开始使用无需。但是,如果硫胺素水平较低,则在开始治疗之前填充硫胺素。在治疗时,所有患者应接受口服硫胺素的预防,并应按照临床表明的硫胺素水平进行评估。如果怀疑脑病,请立即终止并启动肠胃外硫胺素。监测直到症状解决或改善,硫胺素水平正常化[见剂量和给药(2.7)和不良反应(6.1)]。

参考编号:5477197 - accessdata.fda.gov
5.9 与 CYP3A4 抑制剂或诱导剂的相互作用 ...................................... 7 6 不良反应 .............................................. 8 6.1 临床试验经验 .............................................. 8 7 药物相互作用 .............................................. 10 7.1 其他药物对 VONJO 的影响 ........................ 10 7.2 VONJO 对其他药物的影响 ........................ 10 8 在特定人群中的使用 ...................................... 12 8.1 怀孕 ...................................................... 12 8.2 哺乳 ...................................................... 12 8.3 具有生殖潜力的女性和男性 ............................................. 13 8.4 儿童用药 ...................................................... 13 8.5 老年人用药 ............................................................. 13 8.6 肝功能不全 ............................................................. 13 8.7 肾功能不全 ............................................................. 13

SB ID:_________________________整体GPA
•BIO 319景观生态实验室(实验室)(秋季)•BIO 321生态遗传学(LEC)(春季)♦•BIO 336保护生物学(LEC)(fall)♦•BIO 351生态学(LEC)(LEC)(LEC)(LEC)(秋季)•BIO 352生态实验室(Fall)(秋季)♦•Bio 354•Bio 354•Bio 354•Bio 354(lec)(lec)••354 Bio 354(lec)(lec 354)社区生态计算机实验室(LAB)(春季)♦•生物学358生物学与人类社会和性行为(LEC)(春季)•BIO 367分子多样性实验室(LAB)(春季)♦•BIO 383古生物学(LEC/LAB)(LEC/LAB)(Spring)(Spring)(Spring)•Bio 384 Intermediate Statistics(Bio 385)•Bio 385•Bio 385•Bio 385•Bio 385•Bio 385•Bio 385•Bio 385(lec)生态系统生态与全球环境(LEC)(春季)♦•BIO 558生物学与人类社会和性行为(LEC)(春季)•ANP 360灵长类动物保护(LEC)•CEB 556生态学(LEC)•EBH 359行为生态学(LEC)(LEC)(LEC)(fall)•EBH 380 Genomics(lec)(LEC)(秋季)(秋季)(秋季)•338 38 3888888888888888888888888888888888888888888888888888888888888888888888• (LEC/LAB)(春季)•ENS 311生态系统生态学和全球环境(LEC,不用于生物386)(春季)(春季)•ENV 301长岛松树贫瘠的可持续性(LEC)•MAR 301环境微生物学(LEC/LAB)(LEC/LAB)(LEC)(LEC)(LEC)(fall)♦•302 MAR MARICIAL MARIBIAL CORMIAL和MARMIAL ECOLOLIGY(MAR MARICIAL INDER 30 3 30)(lec 30 3 30)(LEC)(lec 303) Long Island Marine Habitats (Lec/Lab)(FALL) • MAR 305 Experimental Marine Biology (Lab)(FALL) • MAR 315 Marine Conservation (Lec)(SPRING) • MAR 320 Limnology (Lec/Lab)(SPRING) • MAR 373 Marine Apex Predators: Ecology and Conservation (Lec)(FALL) • MAR 384 Diseases of Aquatic Organisms (Lec)(SPRING) • MAR 386 Ecosystem Science for渔业管理(LEC)
id 5-识别Bordetella物种
bordetella trematum B. trematum细胞通过腹膜鞭毛流动。运动性不会显着差异。在血琼脂上的16-24小时培养物中,平均细胞宽0.5至0.6µm,长1至1.8µm;最长的杆长高2.4μm。它们产生凸,圆形和灰色的奶油白色菌落,并在血琼脂上整个边缘。他们不需要特殊的增长因素,并在常规媒体上增长。在42°C的孵育温度下不抑制生长,但在25°C下显着降低。菌株在微探针上生长,但不会厌氧。在37°C下在透明的诊断灵敏度测试琼脂上生长的菌落16至24小时在立体显微镜下倾斜地传播的光中表现出绿色的黄色至黄红色虹彩13。
参考ID:5503239 -AccessData.fda.gov
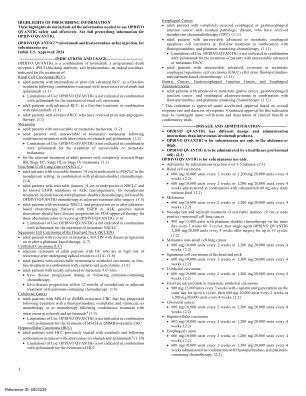
IIB,IIC期,第三阶段或IV期黑色素瘤。 (1.3)非小细胞肺癌(NSCLC)在新辅助环境中可切除(肿瘤≥4cm或淋巴结阳性)的成年患者,结合铂 - 双to骨化学疗法。 (1.4)成年患者(肿瘤≥4cm或淋巴结阳性)NSCLC,没有已知的EGFR突变或ALK重排,用于新辅助治疗,并结合铂二氨酸化学疗法,然后再进行Opdivo Qvantig单疗法治疗后作为辅助治疗。 (1.5)成年NSCLC的成年患者以及基于铂基化疗的进展。 患有EGFR或ALK基因组肿瘤畸变的患者在接受Opdivo Qvantig之前,应在FDA批准的治疗方面具有疾病进展。 (1.6)使用的限制:opdivo qvantig在组合中未指示IIB,IIC期,第三阶段或IV期黑色素瘤。(1.3)非小细胞肺癌(NSCLC)在新辅助环境中可切除(肿瘤≥4cm或淋巴结阳性)的成年患者,结合铂 - 双to骨化学疗法。(1.4)成年患者(肿瘤≥4cm或淋巴结阳性)NSCLC,没有已知的EGFR突变或ALK重排,用于新辅助治疗,并结合铂二氨酸化学疗法,然后再进行Opdivo Qvantig单疗法治疗后作为辅助治疗。(1.5)成年NSCLC的成年患者以及基于铂基化疗的进展。 患有EGFR或ALK基因组肿瘤畸变的患者在接受Opdivo Qvantig之前,应在FDA批准的治疗方面具有疾病进展。 (1.6)使用的限制:opdivo qvantig在组合中未指示(1.5)成年NSCLC的成年患者以及基于铂基化疗的进展。患有EGFR或ALK基因组肿瘤畸变的患者在接受Opdivo Qvantig之前,应在FDA批准的治疗方面具有疾病进展。(1.6)使用的限制:opdivo qvantig在组合中未指示