XiaoMi-AI文件搜索系统
World File Search Systeminspire
Beaula Ruby Kamalam 博士
科学在你身边计划 体育委员会成员 科学展览 本科生协会主席 学术咨询 校际竞赛- PHOBOS NAAC 委员会标准成员 INSPIRE -2020 大学日庆祝活动 自治审查委员会 咨询和绩效委员会成员 烛光委员会成员 宿舍主管 参议院成员 美国大学女子俱乐部

海军 PFA 认可的固定自行车 - MyNavyHR
海军 PFA 认可的固定自行车 - Life Fitness 95Ci / 经典系列 (CLSC) - Life Fitness 95Ci XXL - Life Fitness 95C Inspire - Cybex 750C - Cybex 770C - Cybex 625C - Matrix U5X - Life Fitness INCSC 直立式自行车 注:请参阅指南 5,了解如何设置自行车进行测试的步骤。
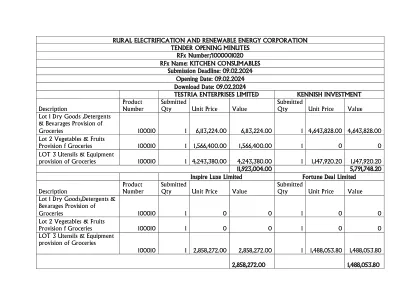
开幕式 RFX 1020 厨房......
提交数量 单价 价值 第 1 批 干货、洗涤剂及饮料 供应杂货 100010 1 6,113,224.00 6,113,224.00 1 4,643,828.00 4,643,828.00 第 2 批 蔬菜及水果 供应杂货 100010 1 1,566,400.00 1,566,400.00 1 0 0 第 3 批 用具及设备 供应杂货 100010 1 4,243,380.00 4,243,380.00 1 1,147,920.20 1,147,920.20 11,923,004.00 5,791,748.20 Inspire Luxe Limited 财富交易有限公司
咨询和放置单元...
•ICAR的国际博士研究金指南•印度政府科学技术部总理奖学金计划,印度政府和印度工业联合会http://wwwww.cii.in/jointfellowssheme http://jointfellowshipshipsschemeshipsschemehipsscheme•科学技术部(科学技术)of India INSPIRE fellowship for Doctoral Research http://www.inspire-dst.gov.in/fellowship.html • Fulbright-Nehru Doctoral Research Fellowships United States – India Educational Foundation http://www.usief.org.in/Fulbright-Nehru-Doctoral-Research- Fellowships.aspx • Jawaharlal Nehru Memorial Trust Cambridge奖学金

解释云和量子计算
量子计算是计算机技术的一个分支,它使用量子理论的原理来处理信息。与传统的二进制计算机不同,后者使用的比特只能是 1 或 0,而量子计算机使用的量子比特可以同时存在于多个状态。这种称为叠加的特性允许进行更复杂的计算,并成倍增加处理能力。云计算是一种通过互联网提供数据存储、服务器、网络和数据库等服务的模型。量子云计算结合了这两种技术,使人们无需拥有一台量子计算机就可以访问强大的量子计算机。IBM 是目前唯一一家提供云量子计算设施的公司,提供免费使用的 5 量子比特机器。云计算和量子计算之间的关系是协同作用。用户无需拥有量子计算机,就可以利用基于云的量子处理来完成复杂的任务,例如解码化合物、优化供应链和管理财务风险。此外,云量子计算通过处理更复杂的数字来实现更安全的加密方法。云量子计算的应用包括教育,它可以用来向学生传授量子计算概念。借助云量子计算机,量子物理教育将变得更加容易。学生无需物理设备即可学习和进行实验。该领域具有巨大的发展潜力,研究人员可以利用云量子计算机来测试理论和开展研究。马丁·雷诺兹 (Martin Reynolds) 表示,由于特定的房间条件和需要新的编程技能,实施基于云的量子计算具有挑战性。IT 团队必须开发专业知识来微调算法和硬件。尽管面临挑战,但云提供商将成为首批提供量子即服务的提供商之一,为开发人员提供访问量子处理的方法。如果实际问题能够得到解决,量子云计算可能会产生与人工智能类似的深远影响。量子力学支持开发创新应用程序,包括量子算法的实施和测试。研究人员可以利用基于云的资源进行实验、测试理论和比较架构。此外,基于云的平台有助于创建向人们介绍量子概念的游戏。在数字化转型领域,可以使用基于云的量子资源处理和预测数 TB 的大数据。 qBraid Lab、Quandela Cloud、Xanadu Quantum Cloud、Rigetti Computing 的 Forest、Microsoft 的 LIQUi| 和 IBM Q Experience 等基于云的平台提供对各种量子设备和模拟器的访问。这些平台提供编程语言、开发框架和示例算法的工具。一些值得注意的基于云的量子资源包括:* qBraid Lab:一个提供软件工具和访问 IBM、Amazon Braket、Xanadu、OQC、QuEra、Rigetti 和 IonQ 量子硬件的平台。 * Quandela Cloud:第一台可通过 Perceval 脚本语言访问的欧洲光子量子计算机。 * Xanadu Quantum Cloud:一个基于云的平台,可访问三台完全可编程的光子量子计算机。 * Rigetti Computing 的 Forest:一个用于量子计算的工具套件,具有编程语言、开发工具和示例算法。 * Microsoft 的 LIQUi|:一个用于量子计算的软件架构和工具套件,提供编程语言、优化和调度算法以及量子模拟器。 * IBM Q Experience:一个通过基于 Python 的 Qiskit 框架或图形界面提供对量子硬件和 HPC 模拟器的访问的平台。这些平台提供各种模拟器和量子设备,包括多个 transmon 量子比特处理器、5 量子比特和 16 量子比特可公开访问的设备,以及通过 IBM Q 网络提供的最多 65 量子比特的设备。 Qutech 是欧洲首个为两款硬件芯片提供基于云的量子计算的平台。Quantum Inspire 平台提供对完全可编程的 2 量子比特电子自旋量子处理器(称为 Spin-2)的访问,该处理器由两个单电子自旋量子比特组成,托管在由同位素纯化的 28Si 制成的双量子点中。它还提供对 Starmon-5(配置为 X 设置的 5 量子比特传输处理器)和 QX(荷兰国家超级计算机 Cartesius 上的量子模拟器后端,最多可模拟 31 个量子比特)的访问。用户可以通过图形用户界面或基于 Python 的 Quantum Inspire SDK(支持 projectQ 和 Qiskit 框架)创建基于电路的量子算法。相比之下,Amazon Braket 提供对 IonQ、Rigetti、Xanadu、QuEra 和 Oxford Quantum Circuits 量子计算机的访问,而 QC Ware 的 Forge 提供对 D-Wave 硬件以及 Google 和 IBM 模拟器的访问。本文讨论了基于云的量子计算,这是一种能够通过互联网访问量子计算机的技术。基于云的方法允许开发人员和研究人员使用不同供应商的量子硬件和模拟器,而无需物理访问设备。这可以促进量子计算领域的协作和创新。一些著名的基于云的量子计算平台包括 IBM Q Experience、Quantum Inspire 和 QC Ware Forge。这些平台为用户提供了一系列用于探索和开发量子算法和应用程序的工具和资源。本文还提到了几篇与基于云的量子计算相关的研究论文和出版物,突显了人们对这一领域日益增长的兴趣。欧洲首款可通过 Perceval 脚本语言访问的光子量子计算机。 * Xanadu Quantum Cloud:基于云的平台,可访问三台完全可编程的光子量子计算机。 * Rigetti Computing 的 Forest:量子计算工具套件,包含编程语言、开发工具和示例算法。 * Microsoft 的 LIQUi|:量子计算软件架构和工具套件,提供编程语言、优化和调度算法以及量子模拟器。 * IBM Q Experience:通过基于 Python 的 Qiskit 框架或图形界面提供量子硬件和 HPC 模拟器访问的平台。这些平台提供各种模拟器和量子设备,包括多个量子比特处理器、5 量子比特和 16 量子比特可公开访问的设备,以及通过 IBM Q Network 提供的最多 65 量子比特的设备。 Qutech 是欧洲首个为两个硬件芯片提供基于云的量子计算的平台。 Quantum Inspire 平台提供对完全可编程的 2 量子比特电子自旋量子处理器(称为 Spin-2)的访问,该处理器由两个单电子自旋量子比特组成,托管在由同位素纯化的 28Si 制成的双量子点中。它还提供对 Starmon-5(配置为 X 设置的 5 量子比特 transmon 处理器)和 QX(在荷兰国家超级计算机 Cartesius 上具有最多 31 个量子比特模拟的量子模拟器后端)的访问。用户可以通过图形用户界面或基于 Python 的 Quantum Inspire SDK(支持 projectQ 和 Qiskit 框架)创建基于电路的量子算法。相比之下,Amazon Braket 提供对 IonQ、Rigetti、Xanadu、QuEra 和 Oxford Quantum Circuits 量子计算机的访问,而 QC Ware 的 Forge 提供对 D-Wave 硬件以及 Google 和 IBM 模拟器的访问。本文讨论了基于云的量子计算,这是一种能够通过互联网访问量子计算机的技术。基于云的方法允许开发人员和研究人员使用来自不同供应商的量子硬件和模拟器,而无需物理访问这些设备。这可以促进量子计算领域的合作和创新。一些基于云的量子计算平台的著名例子包括 IBM Q Experience、Quantum Inspire 和 QC Ware Forge。这些平台为用户提供了一系列用于探索和开发量子算法和应用程序的工具和资源。本文还提到了几篇与基于云的量子计算相关的研究论文和出版物,突显了人们对这一领域日益增长的兴趣。欧洲首款可通过 Perceval 脚本语言访问的光子量子计算机。 * Xanadu Quantum Cloud:基于云的平台,可访问三台完全可编程的光子量子计算机。 * Rigetti Computing 的 Forest:量子计算工具套件,包含编程语言、开发工具和示例算法。 * Microsoft 的 LIQUi|:量子计算软件架构和工具套件,提供编程语言、优化和调度算法以及量子模拟器。 * IBM Q Experience:通过基于 Python 的 Qiskit 框架或图形界面提供量子硬件和 HPC 模拟器访问的平台。这些平台提供各种模拟器和量子设备,包括多个量子比特处理器、5 量子比特和 16 量子比特可公开访问的设备,以及通过 IBM Q Network 提供的最多 65 量子比特的设备。 Qutech 是欧洲首个为两个硬件芯片提供基于云的量子计算的平台。 Quantum Inspire 平台提供对完全可编程的 2 量子比特电子自旋量子处理器(称为 Spin-2)的访问,该处理器由两个单电子自旋量子比特组成,托管在由同位素纯化的 28Si 制成的双量子点中。它还提供对 Starmon-5(配置为 X 设置的 5 量子比特 transmon 处理器)和 QX(在荷兰国家超级计算机 Cartesius 上具有最多 31 个量子比特模拟的量子模拟器后端)的访问。用户可以通过图形用户界面或基于 Python 的 Quantum Inspire SDK(支持 projectQ 和 Qiskit 框架)创建基于电路的量子算法。相比之下,Amazon Braket 提供对 IonQ、Rigetti、Xanadu、QuEra 和 Oxford Quantum Circuits 量子计算机的访问,而 QC Ware 的 Forge 提供对 D-Wave 硬件以及 Google 和 IBM 模拟器的访问。本文讨论了基于云的量子计算,这是一种能够通过互联网访问量子计算机的技术。基于云的方法允许开发人员和研究人员使用来自不同供应商的量子硬件和模拟器,而无需物理访问这些设备。这可以促进量子计算领域的合作和创新。一些基于云的量子计算平台的著名例子包括 IBM Q Experience、Quantum Inspire 和 QC Ware Forge。这些平台为用户提供了一系列用于探索和开发量子算法和应用程序的工具和资源。本文还提到了几篇与基于云的量子计算相关的研究论文和出版物,突显了人们对这一领域日益增长的兴趣。和示例算法。 * 微软的 LIQUi|:一种用于量子计算的软件架构和工具套件,提供编程语言、优化和调度算法以及量子模拟器。 * IBM Q Experience:一个通过基于 Python 的 Qiskit 框架或图形界面提供对量子硬件和 HPC 模拟器的访问的平台。这些平台提供各种模拟器和量子设备,包括多个量子比特处理器、5 量子比特和 16 量子比特可公开访问的设备,以及通过 IBM Q Network 提供的最多 65 量子比特的设备。Qutech 是欧洲第一个为两个硬件芯片提供基于云的量子计算的平台。Quantum Inspire 平台提供对完全可编程的 2 量子比特电子自旋量子处理器(称为 Spin-2)的访问,该处理器由两个单电子自旋量子比特组成,它们托管在由同位素纯化的 28Si 制成的双量子点中。它还提供对 Starmon-5(配置为 X 设置的 5 量子比特 transmon 处理器)和 QX(在荷兰国家超级计算机 Cartesius 上具有最多 31 个量子比特模拟的量子模拟器后端)的访问。用户可以通过图形用户界面或基于 Python 的 Quantum Inspire SDK(支持 projectQ 和 Qiskit 框架)创建基于电路的量子算法。相比之下,Amazon Braket 提供对 IonQ、Rigetti、Xanadu、QuEra 和 Oxford Quantum Circuits 量子计算机的访问,而 QC Ware 的 Forge 提供对 D-Wave 硬件以及 Google 和 IBM 模拟器的访问。本文讨论了基于云的量子计算,这是一种能够通过互联网访问量子计算机的技术。基于云的方法允许开发人员和研究人员使用来自不同供应商的量子硬件和模拟器,而无需物理访问设备。这可以促进量子计算领域的合作和创新。一些著名的基于云的量子计算平台包括 IBM Q Experience、Quantum Inspire 和 QC Ware Forge。这些平台为用户提供了一系列用于探索和开发量子算法和应用程序的工具和资源。本文还提到了几篇与基于云的量子计算相关的研究论文和出版物,突显了人们对这一领域日益增长的兴趣。和示例算法。 * 微软的 LIQUi|:一种用于量子计算的软件架构和工具套件,提供编程语言、优化和调度算法以及量子模拟器。 * IBM Q Experience:一个通过基于 Python 的 Qiskit 框架或图形界面提供对量子硬件和 HPC 模拟器的访问的平台。这些平台提供各种模拟器和量子设备,包括多个量子比特处理器、5 量子比特和 16 量子比特可公开访问的设备,以及通过 IBM Q Network 提供的最多 65 量子比特的设备。Qutech 是欧洲第一个为两个硬件芯片提供基于云的量子计算的平台。Quantum Inspire 平台提供对完全可编程的 2 量子比特电子自旋量子处理器(称为 Spin-2)的访问,该处理器由两个单电子自旋量子比特组成,它们托管在由同位素纯化的 28Si 制成的双量子点中。它还提供对 Starmon-5(配置为 X 设置的 5 量子比特 transmon 处理器)和 QX(在荷兰国家超级计算机 Cartesius 上具有最多 31 个量子比特模拟的量子模拟器后端)的访问。用户可以通过图形用户界面或基于 Python 的 Quantum Inspire SDK(支持 projectQ 和 Qiskit 框架)创建基于电路的量子算法。相比之下,Amazon Braket 提供对 IonQ、Rigetti、Xanadu、QuEra 和 Oxford Quantum Circuits 量子计算机的访问,而 QC Ware 的 Forge 提供对 D-Wave 硬件以及 Google 和 IBM 模拟器的访问。本文讨论了基于云的量子计算,这是一种能够通过互联网访问量子计算机的技术。基于云的方法允许开发人员和研究人员使用来自不同供应商的量子硬件和模拟器,而无需物理访问设备。这可以促进量子计算领域的合作和创新。一些著名的基于云的量子计算平台包括 IBM Q Experience、Quantum Inspire 和 QC Ware Forge。这些平台为用户提供了一系列用于探索和开发量子算法和应用程序的工具和资源。本文还提到了几篇与基于云的量子计算相关的研究论文和出版物,突显了人们对这一领域日益增长的兴趣。Quantum Inspire 平台提供对完全可编程的 2 量子比特电子自旋量子处理器(称为 Spin-2)的访问,该处理器由两个单电子自旋量子比特组成,托管在由同位素纯化的 28Si 制成的双量子点中。它还提供对 Starmon-5(配置为 X 设置的 5 量子比特 transmon 处理器)和 QX(在荷兰国家超级计算机 Cartesius 上具有最多 31 个量子比特模拟的量子模拟器后端)的访问。用户可以通过图形用户界面或基于 Python 的 Quantum Inspire SDK(支持 projectQ 和 Qiskit 框架)创建基于电路的量子算法。相比之下,Amazon Braket 提供对 IonQ、Rigetti、Xanadu、QuEra 和 Oxford Quantum Circuits 量子计算机的访问,而 QC Ware 的 Forge 提供对 D-Wave 硬件以及 Google 和 IBM 模拟器的访问。本文讨论了基于云的量子计算,这是一种能够通过互联网访问量子计算机的技术。基于云的方法允许开发人员和研究人员使用来自不同供应商的量子硬件和模拟器,而无需物理访问这些设备。这可以促进量子计算领域的合作和创新。一些基于云的量子计算平台的著名例子包括 IBM Q Experience、Quantum Inspire 和 QC Ware Forge。这些平台为用户提供了一系列用于探索和开发量子算法和应用程序的工具和资源。本文还提到了几篇与基于云的量子计算相关的研究论文和出版物,突显了人们对这一领域日益增长的兴趣。Quantum Inspire 平台提供对完全可编程的 2 量子比特电子自旋量子处理器(称为 Spin-2)的访问,该处理器由两个单电子自旋量子比特组成,托管在由同位素纯化的 28Si 制成的双量子点中。它还提供对 Starmon-5(配置为 X 设置的 5 量子比特 transmon 处理器)和 QX(在荷兰国家超级计算机 Cartesius 上具有最多 31 个量子比特模拟的量子模拟器后端)的访问。用户可以通过图形用户界面或基于 Python 的 Quantum Inspire SDK(支持 projectQ 和 Qiskit 框架)创建基于电路的量子算法。相比之下,Amazon Braket 提供对 IonQ、Rigetti、Xanadu、QuEra 和 Oxford Quantum Circuits 量子计算机的访问,而 QC Ware 的 Forge 提供对 D-Wave 硬件以及 Google 和 IBM 模拟器的访问。本文讨论了基于云的量子计算,这是一种能够通过互联网访问量子计算机的技术。基于云的方法允许开发人员和研究人员使用来自不同供应商的量子硬件和模拟器,而无需物理访问这些设备。这可以促进量子计算领域的合作和创新。一些基于云的量子计算平台的著名例子包括 IBM Q Experience、Quantum Inspire 和 QC Ware Forge。这些平台为用户提供了一系列用于探索和开发量子算法和应用程序的工具和资源。本文还提到了几篇与基于云的量子计算相关的研究论文和出版物,突显了人们对这一领域日益增长的兴趣。这些平台为用户提供了一系列工具和资源,用于探索和开发量子算法和应用。文章还提到了几篇与基于云的量子计算相关的研究论文和出版物,凸显了人们对该领域日益增长的兴趣。这些平台为用户提供了一系列工具和资源,用于探索和开发量子算法和应用。文章还提到了几篇与基于云的量子计算相关的研究论文和出版物,凸显了人们对该领域日益增长的兴趣。

MIMs Plus:Living-in.EU 技术规格
LI.EU 概念文件中概述了此规范文档的治理。它非常简单:MIMs Plus 技术规范由 LI.EU 技术小组通过定期会议制定,由小组负责人 OASC 召集。LI.EU 宣言的所有签署方和 LI.EU 合作伙伴都可以做出贡献。当达到稳定版本时,它将被提交给由欧盟委员会召集的 LI.EU 指导委员会批准。每个特定元素(如 SAREF、OASC MIM、INSPIRE、EIRA、OneM2M 等)由其各自的治理论坛管理。
先进材料与工艺研究所(...
SN 标准适用于 1. 博士(工程学):获得四年制工程/技术学位或 4/5 年制理学学位后,获得工程或技术硕士学位;或综合最低 5 年制理学硕士学位;或同等学历。并且获得至少一项可在 CSIR 研究所任职的国家级奖学金(从以下选项中选出):UGC/CSIRNET/NBHM/RGNF/INSPIRE 或有效的 CSIRJRF/SRF 或同等奖学金。所有这些奖学金都应颁发。项目助理(仅在 CSIR-AMPRI)、高级研究员和 CSIR 科学家也有资格申请(根据 AcSIR 条例第 3.6.2 条)。
量子:计算的新时代?
• IBM Q, 18 QC's online (free or paid) with up to 53 qubits • Google Sycamore, access on request, up to 54 qubits • Rigetti, access on request or via AWS Braket, up to 32 qubits • IonQ, access on request or via AWS Braket, up to 11 qubits • Honeywell, access TBA or via AWS Braket, up to 6 qubits • Xanadu, 8/12 Qubits宣布了24个,应要求访问•Qutech的Quantum Inspire,最多5 Q QUBITS 30多个新企业在全球范围内建造量子系统

印度理工学院印多尔分校
印度申请人的最低教育资格 (MEQ) 和资格考试:电气/电子/电子与通信/物理/仪器与控制工程/材料科学与工程/数学硕士学位或任何其他同等学位,专业领域为通信和信号处理或微/纳米电子与 VLSI 领域或电力电子和电力系统/控制系统(由授予机构/大学定义的一级),具有 UGC/CSIR/DBT - JRF 资格或 DST INSPIRE 奖学金或同等奖学金。如果任何教职员工在赞助项目下有 JRF/SRF 空缺,则仅具有 EE/EC/IN/PH 论文 GATE 资格或 UGC-NET-LS 资格的候选人可能会在 FA(项目)模式下被考虑。