XiaoMi-AI文件搜索系统
World File Search Systemkinematics

电话thiha kyaw
3月2024“ Robotics TechTalk”,邀请Talk,缅甸美国中心仰光。2019年12月,“移动机器人运动学”,邀请的研讨会,机器人技术实验室和AI(Lora),缅甸仰光技术大学。Jul。2019年“工程和机器人技术”,邀请演讲,缅甸的Gakken课堂教育研讨会。2019年2月,“初学者的Python编程”,邀请的研讨会,Makerfest Myanmar。Jul。2018“ Python编程简介”,邀请的研讨会,缅甸Barcamp Tu Hinthada。

课程描述ETI4480C |应用机器人
课程描述ETI4480C |应用机器人技术| 4.00学分,这是一门上层课程,旨在介绍机器人编程,并包括用于多功能零件操纵和带有步进和伺服运动的机器人应用程序。学生学习与机器人设计有关的主题,包括机器人视觉,运动计划,传感器和传感器,执行器,导航系统,移动性,前进和逆运动学以及路径计划。实验室活动提供了概念和理论的动手应用。

通过加强学习的集成钻头寻求洞控制
摘要 - 智能钻孔寻求洞穴是一种有前途的技术,可提高钻孔效率,减轻潜在的安全危害并减轻人类操作员。大多数现有的智能钻臂控制方法依赖于基于反向运动学的分层控制框架。但是,由于反向运动学的计算复杂性以及多个关节的顺序执行效率低下,这些方法通常是耗时的。为了应对这些挑战,本研究提出了一种基于强化学习(RL)的综合钻孔控制方法。我们开发了一个集成的钻臂控制框架,该框架利用参数化策略在每个时间步骤中直接为所有关节生成控制输入,利用关节姿势和目标孔信息。通过将寻求洞穴的任务制定为马尔可夫决策过程,可以直接使用当代主流RL算法来学习寻求洞穴的政策,从而消除了对逆动力学解决方案的需求并促进合作的多关节控制。为了在整个钻井过程中提高钻孔精度,我们设计了一种结合Denavit-Hartenberg联合信息并预览寻求洞穴差异数据的状态表示。仿真结果表明,就寻求洞的准确性和时间效率而言,所提出的方法显着优于传统方法。索引术语 - 强化学习,集成的钻头控制,寻求孔,机器人臂
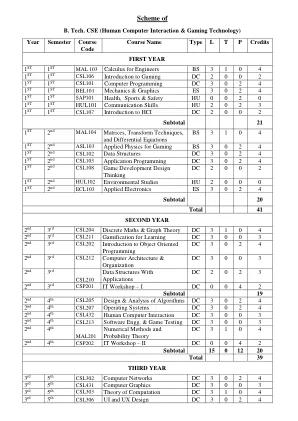
B. Tech. CSE(人机交互与游戏...
课程内容: 模块 1:基本概念 游戏物理 – 游戏引擎(简介)- 物理真实感 – 在游戏中的重要性、物理概念和游戏性能、基础知识 – 坐标系和参考系、标量和矢量、计算矢量大小、矢量叉积、矩阵 – 乘法和旋转、导数。 模块 2:基本牛顿力学和运动学 牛顿三运动定律 – 惯性 – 力 – 质量 – 加速度相等和相反的力、力矢量、力的类型 – 引力 – 摩擦力 – 向心力 – 力平衡和图表、功、能量 – 动能 – 势能 – 守恒 – 功率、平移运动 – 运动方程、旋转运动 - 扭矩 – 角加速度、2D 粒子运动学、3D 粒子运动学、刚体动力学。模块 3:抛射物抛射物属性、简单轨迹和重力、阻力、马格努斯效应 - 抛射物的旋转效应、游戏中的特定抛射物类型 - 炮弹 - 子弹 - 箭、可变质量。模块 4:碰撞:冲量和动量原理 - 线性和角冲量、弹性和非弹性碰撞冲击、恢复系数、碰撞方向和检测、与可移动和不可移动物体的碰撞、与摩擦的碰撞、2D 和 3D 碰撞、游戏应用。模块 5:物理建模:游戏车辆的物理学(飞机、轮船和小船、汽车和气垫船、枪支和爆炸、运动)教科书:1. 游戏程序员的物理学,

一种约束嵌入方法,用于与混合四肢平行运动学操纵器的动力学建模
平行运动学操纵器(PKM)的特征是封闭的运动环,由于四肢平行排列,但也是由于四肢中存在运动环。此外,许多PKM都是由通过串行组合运动环构建的四肢构建的。这样的四肢称为混合动力,形成了特定类别的复杂四肢。设计和基于模型的控制需要精确的动态PKM模型,而无需简化模型。动力学建模需要在PKM的标准运动学建模中具有运动关系,在该模型中,仅计算了操纵器的正向和逆运动解(相关输入和输出运动)。这与杂种四肢的PKM更加涉及。在本文中采用模块化建模方法,分别处理四肢,并且动作的单个动态方程(EOM)随后将其组装到整体模型中。运动模型的关键是四肢内单个循环的约束分辨率。此局部约束分辨率是一般约束嵌入技术的特殊情况。提出的方法最终允许对一般PKM进行系统的建模。该方法用于IRSBOT-2,其中每个肢体包含两个独立的回路。©2022作者。由Elsevier B.V.这是CC下的开放访问文章(http://creativecommons.org/licenses/4.0/)。

机械与航空航天工程 (MAE)
MAE 6210. 连续介质力学。3 学分。张量分析;连续介质力学的基本概念;连续介质的运动学;质量、线性动量、角动量、能量和熵的平衡定律的推导;本构理论的公理;本构理论的公式化;昂萨格原理;客观性;各向同性函数的表示定理;塑性,包括内部变量的概念、屈服面、返回映射算法。入学前需获得系里的许可。(秋季,每年)
I B.E. -Nie 计算机科学与工程部-NIE Hemanth R -Nie 博士
先决条件,如果任何大学前物理学和数学学习目标•构建现实世界中问题的“自由人体图”,并应用牛顿的运动定律和矢量操作来评估颗粒和身体的平衡。•确定力矩并计算其在指定轴上的值。定义一对夫妇的时刻。•分析桁架和学生中的成员力量,以了解摩擦对不同飞机的影响•发展学生的能力,以找出重力和惯性时刻及其应用,并了解运动学和动力学及其应用。


利用神经接口和深度学习感知人手的全部动态
摘要 — 神经控制运动的理论主要基于运动传感设备,这些设备可以捕捉预先定义的解剖标志的动态。神经肌肉接口,例如表面肌电图 (sEMG),理论上可以通过感知由运动的最终路径(运动单元)传输的运动命令来超越基于运动的技术所施加的限制。运动单元活动的记录可以连续地预测时间和空间中的动力学和运动学,而不受数码相机或惯性传感器所遭受的几个生物和物理限制。然而,目前的 sEMG 解码算法只能预测几个自由度(<3)。通过结合无标记机器视觉和高密度 sEMG 电极,我们旨在检验以下假设:受生理启发的深度神经网络可以像数码相机一样精确地重建人手的运动,并且还具有预测潜在力量(例如,抓住一杯咖啡)的额外好处。我们证明,我们的深度学习模型可以在自然运动任务中,通过仅放置在外部手部肌肉上的 320 个 sEMG 传感器,以可忽略不计的误差持续预测手部的所有自由度。我们的深度学习模型能够显示 3D 手部运动学和等长收缩期间手指的全部力量范围。目前的结果表明,将深度学习应用于 EMG 信号可以前所未有地表示最终的运动神经代码。

从人类脑内颅内记录中解码连续的目标指导运动
摘要。伸出手是一种轻松而复杂的行为,在日常生活中是必不可少的。因此,恢复ARM功能是四肢瘫痪者的重点。最近,已经观察到并在运动皮层之外观察到了运动的神经相关性,但是运动表示的程度和粒度尚未完全了解。在这里,我们通过将神经相关性解码为目标定向行为的12种不同的运动学来探讨与大脑运动相关的神经活动的神经含量。植入立体定向脑电图电极植入的18名参与者执行了游戏化的3D目标运动任务。我们证明,可以使用优先子空间识别(PSID)中的所有参与者中的低,中和高频信息从分布式记录中解码连续运动运动学。运动的神经相关性分布在整个大脑中,包括诸如基底神经节和岛状等较深的结构。此外,我们表明只能使用目标指导的参考框架对手位置进行解码,这表明广泛的低频活动与运动的高阶处理有关。我们的结果加强了众多大脑区域存在广泛的运动相关动力学的证据,可用于连续解码运动。结果可能会为运动皮层受损的个体,例如中风后或用于自适应闭环系统中的控制信号。