点击购买,资源将自动在新窗口打开.
获取独家产品信息,尽享促销优惠!立即订阅,不容错过
* 限···时··优惠
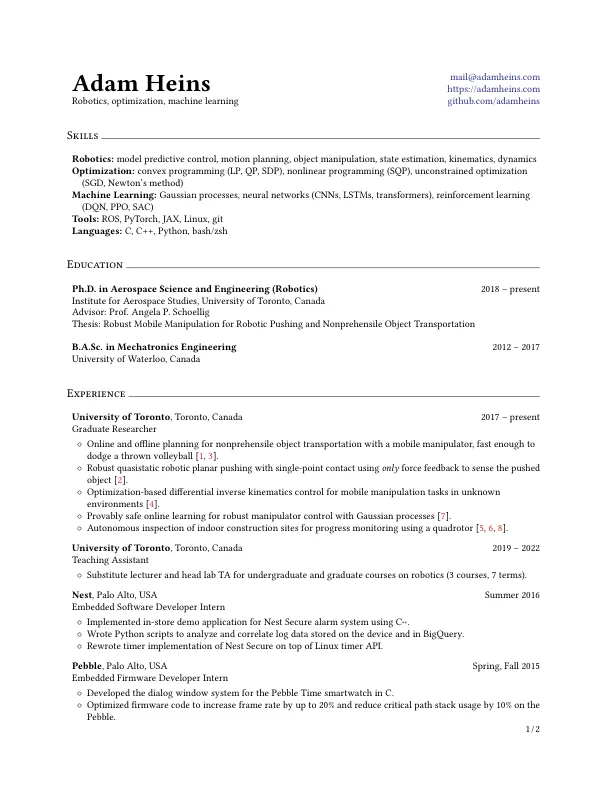
◦在线和offl ine计划与移动操纵器进行非忧虑的物体运输计划,足以躲避投掷的排球[1,3]。◦强大的绝对机器人平面与单点接触推动仅使用强制反馈来感知被推入的对象[2]。◦基于未知环境中移动操纵任务的基于优化的分歧逆运动控制[4]。◦可证明具有高斯流程的强大操纵器控制的在线学习[7]。◦自主检查室内施工站点,使用四极管[5,6,8]进行进度监测。
主要关键词