XiaoMi-AI文件搜索系统
World File Search Systemmanipulator

探索自主林业行动的可行性
图2转发器起重机:具有四个自由度的液压操纵器,在此图中指定为避免Q 1,Inner Boom Q 2,外臂Q 3和望远镜Q 4。它具有末端效应器,该效应器在繁荣的尖端上,作为抓取日志的工具。它被称为抓手,具有两个主动度的自由度,指定为旋转的Q 5,开口Q 6。所有传感器在逆时针方向上测量正阳性。

机器人和远程系统在核退役和放射性废物管理中的应用现状、障碍和成本效益
NEA/RWM/R(2022)1 | 7 图表列表 图 1. (左):1949 年机械主从机械手 (MSM) 装置的报告,由 RC Goertz 在美国阿贡国家实验室设计。 (右):非常相似的装置,如今在世界各地用于核工业中执行的绝大多数远程操作。 24 图 2. AREVA 在放射性环境中部署的 CEA 力敏遥控系统的控制架构。请注意位于人类操作员和输入主设备(左)与从属机械手(右)之间的高度复杂的算法和软件架构。 25 图 3. 自主运动规划器引导机器人激光切割曲面,由 3-D 计算机视觉捕捉。这是机器人首次在放射性环境中自主移动。 26 图 4. 对 RRS 实施中感知到的障碍和担忧的相对重要性进行总结 31 图 5. 对 RRS 实施中感知到的障碍和担忧的总分进行总结 33 图 6. FREMES 传送带通过 HPGE 伽马能谱仪自动对比利时德塞尔的放射性废物进行分类。40
空间机器人如何受益于世界标准......
EtherCAT 支持任何拓扑,而不会影响性能,也不存在级联交换机或集线器所带来的复杂性:线型、树型和星型拓扑可以自由组合。每个网段最多可以有 65,535 个节点。一个主站可以托管多个网段。EtherCAT 主站可以使用拓扑识别功能自动检测网络变化,该功能将实际网络与主站预期的配置进行比较,并据此重新配置。因此,节点可以在运行期间连接和断开。动态适应网络识别允许在运行期间连接和断开网络段或单个节点,例如当机器人操纵器抓取并连接到特定的基于 EtherCAT 的传感器工具时。EtherCAT 从站控制器是此热连接功能的基础。EtherCAT 会自动为从站节点分配地址,因此无需手动寻址。这高度支持不断变化的机器人操纵器配置,其中机器人必须扩展其内部数据网络以包括外部抓取负载和/或传感器。地址可以保留,这样如果添加更多节点,就不需要新的寻址,因为在启动时地址会自动分配。

ROV深发现者
Rov Deep Discoverer(简称为“ D2”)可以在海面以下最多6,000米(19,685英尺),这意味着它几乎可以探索海洋中的任何地方,除了深沟。D2携带各种相机设备,采样工具和传感器,以收集潜水期间有关深海的尽可能多的信息。其主摄像头可以从3米(10英尺)远的三英寸长生物体放大,并倾斜以捕捉宽阔的视野,从而有助于查看从小生物到深海中大规模栖息地的所有事物。D2的实时视频从海底到船上旅行,然后通过卫星连接到位于岸上的科学家。他们使用实时视频为飞行员提供有关去向地点以及要收集哪些样本的指导。d2的多关节操纵臂非常灵活,使操作员具有操纵和收集生物学和地质样品的能力。飞行员还可以控制操纵器臂下颚的握力,从而使他们轻轻夹住脆弱的珊瑚样品或捡起沉重的岩石或矿物样品。直播ROV视频也被广播到互联网,使任何人都可以参加D2的冒险经历。
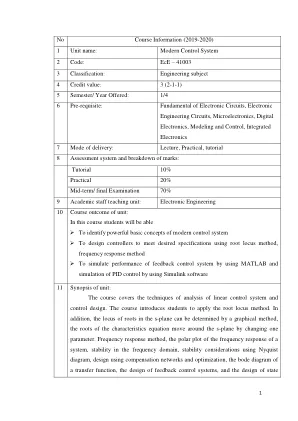
现代控制系统 2 代码:EcE – 41003 3 分类
7.1 简介 7.2 根轨迹概念 7.3 根轨迹程序 7.4 根轨迹法参数设计 7.5 灵敏度和根轨迹 7.6 PID 控制器 7.7 激光操纵器控制系统 7.8 机器人控制系统的设计 7.8.1 使用 MATLAB 的根轨迹 7.9 磁盘驱动器读取系统 7.10 总结 8. 频率响应方法
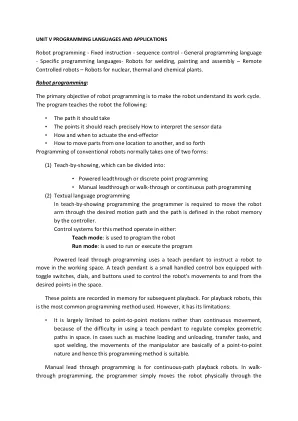
机器人编程-固定指令-顺序控制
如果机器人太大,无法用物理方式操控,可以用几何形状基本相同的机器人复制品代替实际机器人。在编程过程中,操纵复制品会更容易。连接到机器人或复制品手腕的示教按钮可充当特殊编程设备。按下按钮时,操纵器的运动将成为程序的一部分。这允许程序员进行不属于程序一部分的手臂动作。程序员能够借助特殊编程设备定义最终程序中未包含的运动。

3- ...
摘要。在组装,焊接和绘画等行业中,对精确和多功能机器人系统的需求越来越多,这表明了运动学分析的重要性。本文旨在研究和解释三度(3-DOF)操纵器的运动学特性,该操作器涵盖了旋转磁盘,例如基础和两个旋转的接头,也称为旋转接头。通过分析前进和逆运动学,本文旨在更好地理解并控制该机器人臂显示的运动性质。Forward kinematics entails calculating the values of the location and orientation of the end effector in connection with particular joint parameters.另一方面,逆运动学旨在找到特定的关节参数,以达到特定的最终效果位置。本文使用数学模型和计算算法来求解运动学方程,从而使操纵器可以精确地移动其域内。通过比较所使用的转换矩阵的详细模型,机器人组的工作移动得到了完全预测和调节。从这种批判性分析中得出的结论是,所提出的解决方案导致对机器人运动运动的理论理解有重大飞跃,并有效地对精确的工作自动化环境具有有效的影响。因此,此基础为开发高级机器人控制算法创建了更多途径。

探索自主林业行动的可行性
图2转发器起重机:具有四个自由度的液压操纵器,在此图中指定为避免Q 1,Inner Boom Q 2,外臂Q 3和望远镜Q 4。它具有末端效应器,该效应器在繁荣的尖端上,作为抓取日志的工具。它被称为抓手,具有两个主动度的自由度,指定为旋转的Q 5,开口Q 6。所有传感器在逆时针方向上测量正阳性。

社论:太空中的机器人操控与捕获
检查、加油、升级、维修或救援卫星,清除轨道碎片,以及建造和维护大型轨道资产和基础设施等要求对于在轨空间基础设施的维护非常重要。到目前为止,所有值得注意的维修任务都是由宇航员舱外活动 (EVA) 在低地球轨道 (LEO) 上执行的。然而,这些操作风险大、成本高、速度慢,有时甚至不可行。EVA 可以被机器人在轨维修 (OOS) 取代,在此期间,任务由空间机械手系统 (SMS) 执行,在文献中也称为追逐者或服务者。它们由一个卫星基座组成,该基座配备一个或多个带有抓钩装置的机器人机械手(臂),并由视觉系统驱动,从而能够捕获目标(客户)卫星。SMS 也可以是安装在空间设施上的大型维修机械手。本研究课题重点关注在轨操纵和捕获,以及与这些活动相关的方面。因此,它包括与刚性和柔性 SMS 的动力学、相关的接触动力学、空间系统的识别方法、监控和控制所需的姿势和状态感测、抓取目标的运动规划方法、运动或交互任务期间的反馈控制方法以及此类系统的地面测试试验台相关的工作。该研究主题包括五篇文章。在《从空气轴承支撑的测试数据估计空间机械手的振动特性》中,李等人从理论和实验上研究了与平面实验测试试验台相关的问题,该试验台使用空气轴承垂直支撑缩放 SMS 并在平面上创建零重力环境。作者指出,空气轴承会影响缩放 SMS 的动力学行为,从而影响其表观关节的刚度和阻尼、固有频率和振动响应。作者提出了一套程序来消除空气轴承的影响,并从电机制动系统的测试数据中识别真实的等效关节刚度和阻尼。识别惯性特性,并使用遗传算法确定等效关节刚度和阻尼。通过消除空气轴承引起的额外惯性,可以估算出机械手的真实振动特性。在《废火箭级在轨机器人抓取:抓取稳定性分析和实验结果》中,Mavrakis 等人研究了废火箭级的抓取,分析了抓取稳定性,并展示了实验结果。提出了一种评估废火箭级机器人抓取稳定性的新方法,该方法基于计算 Apogee Kick Motor 喷嘴的两指抓取的固有刚度矩阵,并将稳定性指标定义为局部接触曲率的函数,材料特性、施加的力和目标质量。稳定性指标是

Kratos AXIS Supra X 射线光电子能谱仪
● 5 轴精密软件控制机械手,精度 2µm(X、Y、Z 轴) ● 样品最大尺寸:直径 32 mm,厚度 7 mm ● 样品加热/冷却温度范围:-100°C 至 800°C ● 磁透镜确保高效收集光电子 ● 光谱横向分辨率 15 µm,并行成像横向分辨率 1 µm ● 检测限 0.1 至 1 原子% ● 深度分辨率:2 至 8 nm ● 使用低能电子进行电荷中和,用于分析绝缘样品